I’ve tried to use autotune on my quadcopter Pixhawk 1 running 3.6.12 twice now and both times on the third twitch it rolls to the right and dives in to the ground at about 45 degrees. I switched over to Stabilize but I was too low to save it. I’m thinking that I might try it with the aggressiveness set lower but would appreciate any feedback first. Log located here
Thanks.
1 Like
Can we get some details about your craft? How big? What type of ESCs and motors?
It’s an Aeronavic’s CX-600 quad 600mm diagonal. HobbyKing 40Amp generic ESCs with T-Motor 3510-25 360kv motors. Pixhawk 1 running 3.6.12, 13 in props. Here’s a short video of it flying.
There is a known issue with low kva motors and simonk escs and autotune. You might be running into an issue with sync loss
Try autotune at .05 or even .04
Thanks. Been a while since I saw a sync issue but I think you are right. I’ll lower the tuning aggressiveness and give it another go.
did you followed tuning instruction before running auto tune ?
it seems that your copter was not stable enough to run auto tune
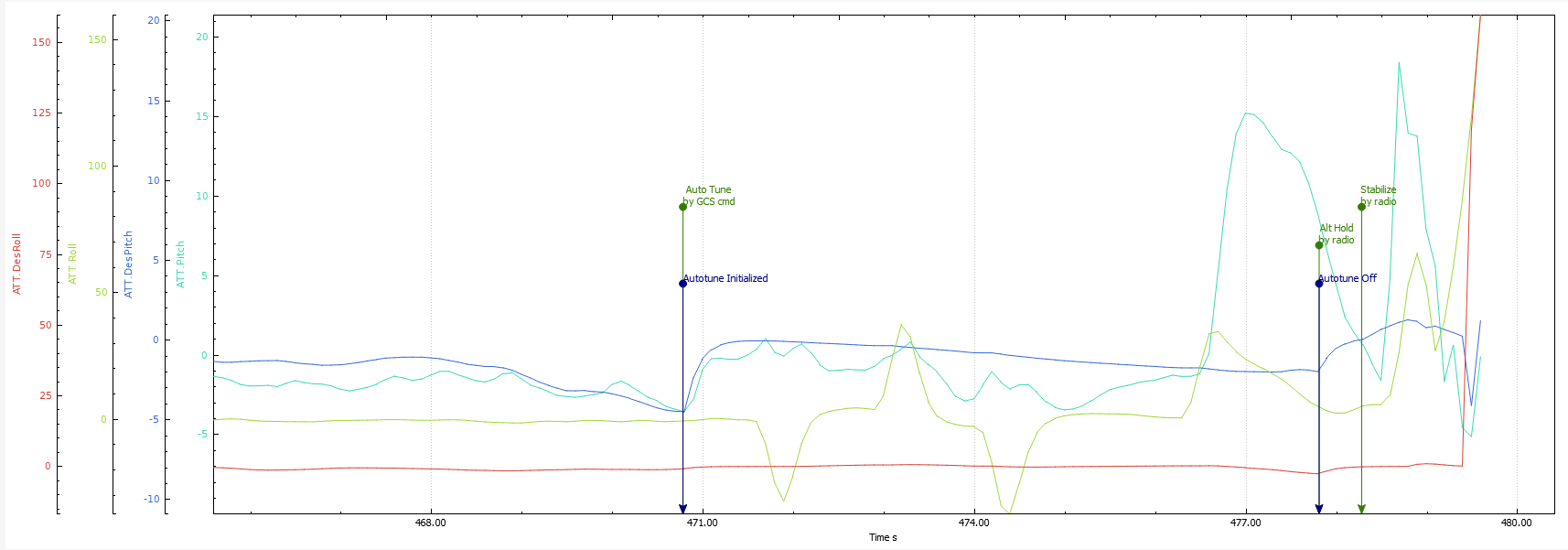
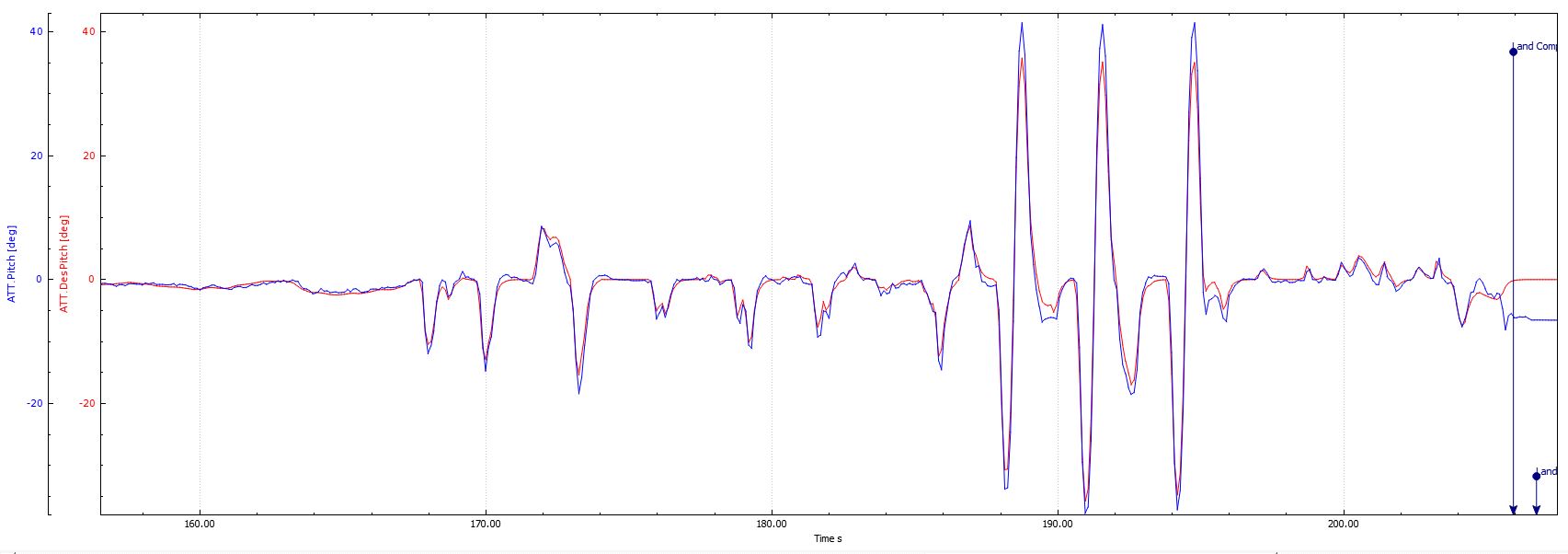
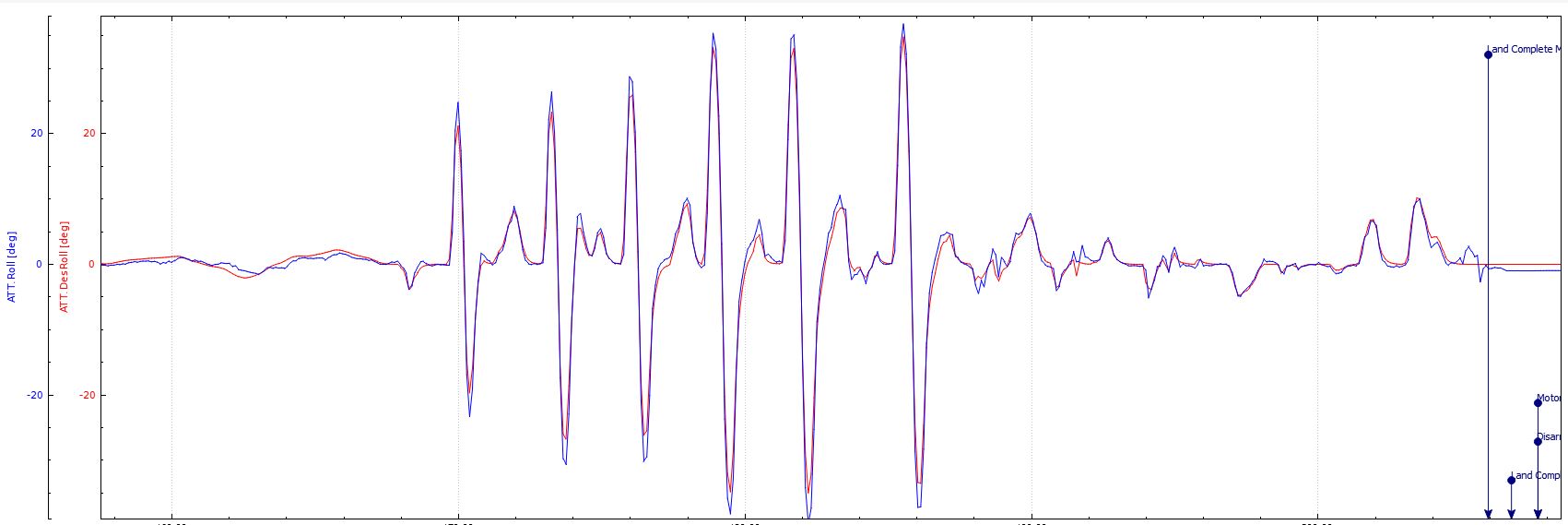
It was flying well before the autotune. Isn’t that what the graph shows? Pitch and Des Pitch are fine as are Roll and Des Roll up until the autotune starts doing the twitching on the Roll axis. Then on the fourth twitch the Pitch dives and it rolls to an extreme which would be when a motor stopped?
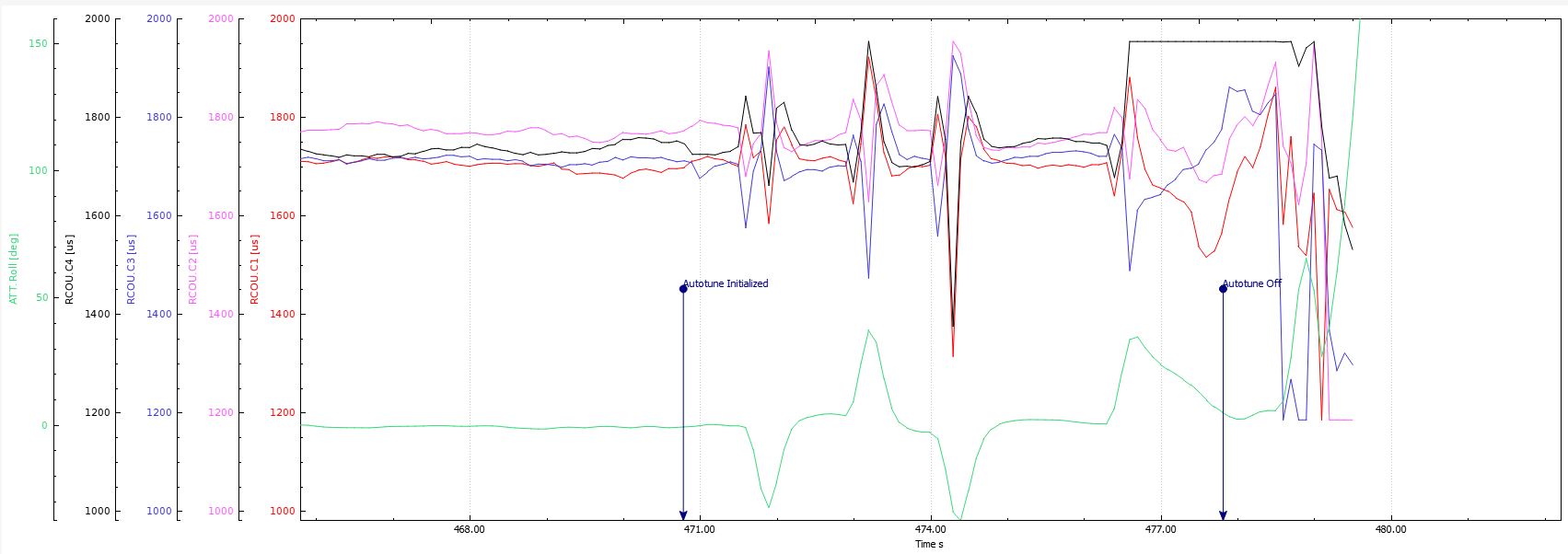
There could be a couple problems here. The craft is a bit under powered. Average Motor outputs ~1700 at hover so when agressive power is demanded from Autotune Roll it’s at max which will always cause instability (lack of control headroom). Thrust was lost on Motor 4 for some reason after a few roll twitches and down she went.
I have a similar setup to your’s with 3508-380kV, 13" props on 6S. My MOT_THST_HOVER is ~.22, yours is ~.53 so obviously you are caryying a lot more weight. Too much I would suggest. What is the All-Up-Weight? What are the largest props you can fit? 14’s? Larger?
Also, I would take Hosein’s advice and configure the parameters as per the Tuning Process Instructions for your craft. I would not say the Desired/Actual roll/pitch is that good.
Thanks for that. I really appreciate the help. You are right about the weight. I had two 4A batteries on at the time given I didn’t have any payload and wanted to fly longer. Next time I do this I’ll use two 3A batteries instead which will really lower the weight.
With that setup you don’t want it any heavier than ~2kg. If you can get 15" props on there ~2.5kg
Try to fly with less weight for auto tune and its important to remove anything makes vibration or shake like gimbal, after finishing auto tune you can install removed parts again
About weight Dave is true , i was tried to auto tune with same as your pwm outputs , no luck the only result was bad pid values.
But at all finishing tuning instructions is important before any flight
Look at the graph , your current and Des are not match together before starting auto tune and after starting copter couldn’t hang on Des values
After dropping the weight I would suggest updating to V4.0.0 (Stable now), set the tuning parameters as per the link, then complete the notch filter procedure. There is a learning curve to the later but worth doing and it’s in Stable now so why not take advantage of it. Then try Autotune. That said the Autotune that I got on my 13" quad was too mushy feeling for my liking so I ended up tuning manually. A bit more tweaking to do but it’s flying great now.
Some tuning results. A bit of overshoot that I’m working on but it may be as best as it will get for a quad this size and low kV motors.
Very helpful advice everyone. I did read the tuning page but a bit too lightly obviously. I’ll go back, do my homework and report back how things go. Thanks so much for all the help. I’m looking forward to having the copter tuned up and flying well.
Try these as starting points:
INS_GYRO_FILTER 29
ATC_RAT_PIT_FILT 14.5
ATC_RAT_RLL_FILT 14.5
ATC_RAT_YAW_FILT 2
ATC_ACCEL_P_MAX 87000
ATC_ACCEL_R_MAX 87000
ATC_ACCEL_Y_MAX 24000
ACRO_YAW_P 2.67
And set:
MOT_BAT_VOLT_MAX 25.2
MOT_BAT_VOLT_MIN 21.0
Check:
MOT_SPIN_MIN 0.20000000298023224 (min prop speed while flying in stabilise mode)
MOT_SPIN_ARM 0.20000000298023224 (min prop speed armed but not flying)
I’d expect MOT_SPIN_ARM to be less than MOT_SPIN_MIN, maybe around 0.12. Check with the Mission Planner motor test and see what minimum speed your motors will reliably start at. For example 10% in MP motor test = 0.1 in parameters.
CAUTION STAY CLEAR OF PROPS DURING MOTOR TEST - I wouldn’t advise messing around too much, just check the minimum start-up speed and then avoid the motor test section.
I made the changes suggested, made sure it was under 2.5kg and went up in prop size from 13" to 14" folding. Seemed to be flying quite well before the Autotune.
Switched to Autotune and same results. A couple of twitches and it rolled to the right and went in to the ground at about a 45 degree angle. Looking at the graphs it doesn’t seem that far out of tune now so I think I’ll stick with transmitter based manual tuning. Although this is a bit odd.
Your motor PWM is avg 1700uS which does not leave you much headroom for stability.
This is by the last log posted.
You seem to have an issue with motor 4 which looses power
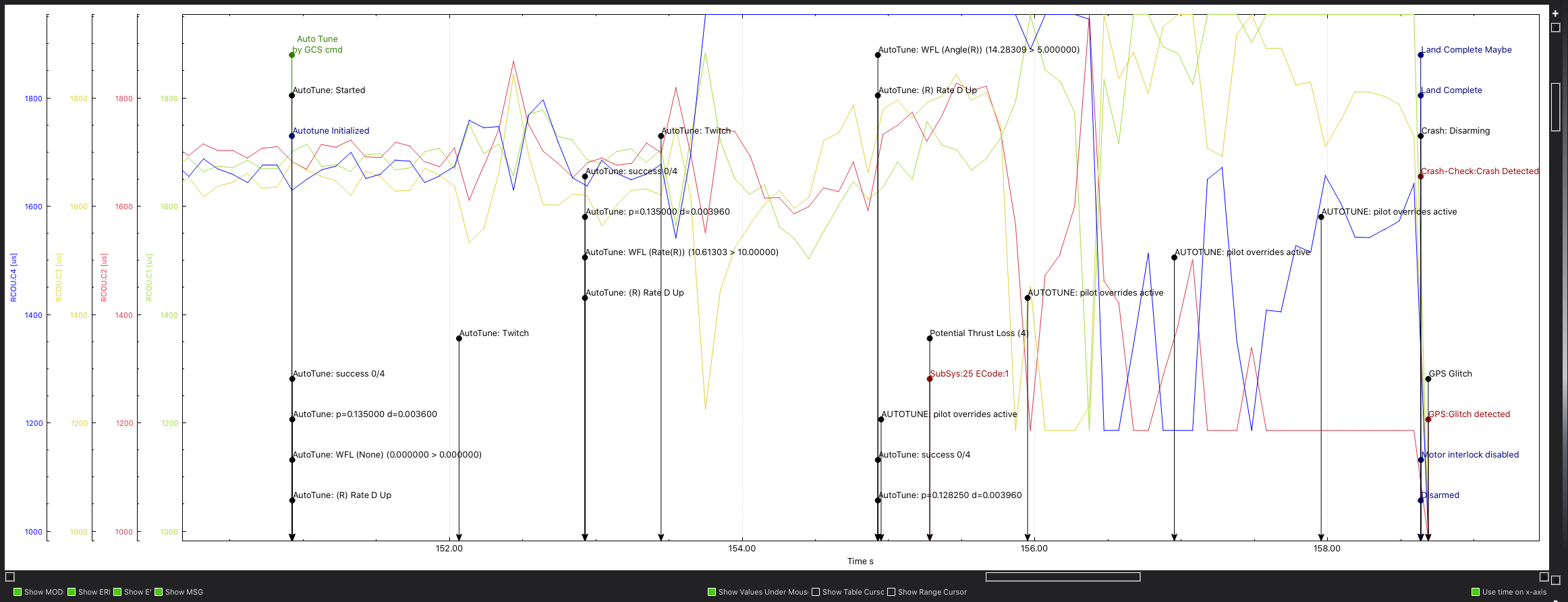
{kind=link}
You can see the message “potential thrust loss”
You also still have your ATC_RAT_PIT/RLL_FILT at 20 which will flip a copter if too far out of balance.
Have read of the new tuning page in the Wiki
The wiki refers to ACT_RAT_PIT_FILT which does not exist in my parameters. So I thought it might be ACTC_RAT_PIT_FLTD which I changed from 20 to 15 as instructed. I’m assuming I should have also changed ATC_RAT_PIT_FLTT as well given your comment?
The loss of motor 4 is of course the big issue. I suspect a synch issue happening there.
Thanks for your help. What software are you making the graphs with. Very nice and quite helpful.
There are a few changes recommended in the tuning wiki, ATC_RAT_RLL_FILT and ATC_RAT_PIT_FILT being just 2 of them.
I use APM Planner for all my graph analysis.
I forgot to mention that I also updated the firmware to version 4.0.
Yes, I think set both ATC_RAT_PIT_FLTT and ATC_RAT_PIT_FLTD and RLL sets of parameters in AC 4.0, use 14.5