I’ll post a summary of what tridge and I think happened that caused my emergency autorotation.
So, analyzing the tlog is very useful and those tlogs contain WAY more information on things than I ever thought they did, once you learn how to decipher the MavLink messages. The information contained in the tlog, based on remnoise and remrssi vs data received from the FMU, and the timing, indicate the controller powered down in flight momentarily. Which caused the IOMCU to close the throttle to fuel cutoff and put all my servos at trim value. Making an almost perfect entry to autorotation, as this part of the system is powered from the servo rail.
So we found a couple problems. The POWER FLAG messages indicate that my backup power to the controller wasn’t working. This is a bitmask that is set based on the system sensing where it has power available. Primary power to the controller is from the power brick, secondary is on the USB port with a little “smart” NiCAD battery pack. The power flag was 1, it should’ve been 5 if there was actually power on the USB port.
So on a bench test with the system powered from the backup battery the power flag is 4, like it should be. This is what I use for pre-flight to power the system up, warm up the IMU’s etc, without powering the servos, to save on flight systems power until the engine is started and the generator starts charging the flight battery. When I flip the master switch and turn on main systems power, the power flag goes to 1 instead of 5. The reason is because the backup “smart battery” senses no load, so it shuts down its output after a period of time. And it will not repower the system without being physically unplugged and plugged in again. It was my fault for not testing this thoroughly enough, as I did not realize that little battery will not put out power after it has shut down by its “smart” circuit.
So there was no backup power to the controller.
The power brick that comes with the CUAV v3 controller says it accepts 2S to 8S input. But these do NOT work on 2S power. It requires minimum 3S to get power out of the voltage regulator to the controller. So I have a Hex Power Brick Mini on it instead, as this one as has always worked on 2S. However, it may not work reliably on 2S. If the flight systems power sags due to servo or payload load on the system, with that power brick operating on the lower end of the voltage regulator’s range, it will cut the power to the controller momentarily.
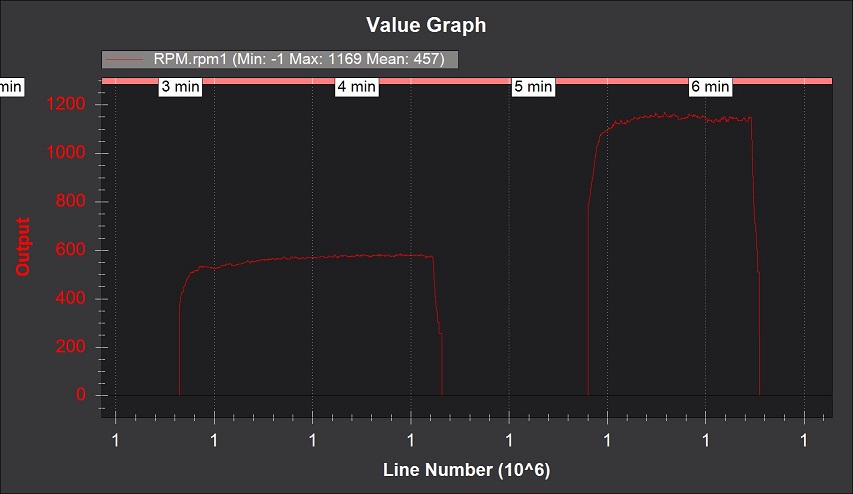
I just verified this on a bench test. I powered the system up with the voltage at 7.8V. I let the system run long enough to get the battery to sag to 7.5V. With a probe on my DVOM to measure the voltage I armed it and operated all the servos with the RC. The voltage to the controller dropped to 3.91V.
So my conclusion is that in my piston helicopters running a 2S flight systems voltage that I should be using a different style of BEC that is suited to 2S input to power the electronics. Only use the power brick to monitor the system voltage to ensure the generator is working. And, of course, change my backup battery to a “non-smart” one that continuously powers the backup port.
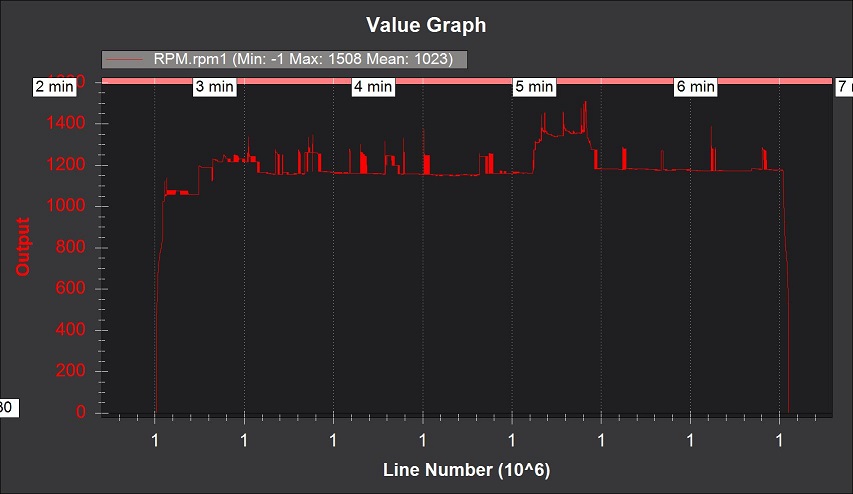
Thought I’d pass along what we learned, as this could happen to other people running HV servos on straight 2S power, and powering their system with the power brick that comes with the controller on the 2S battery. The generator normally maintains 7.85V system voltage. But in this case the tlog indicates the servo rail was down to around 7.7V due to the battery being a bit low from bench running it in the shop prior to the flight. It takes the generator an hour to charge up the battery to normal voltage if it’s low, along with powering the rest of the system load. And I think that sagged voltage was just enough to cause the power brick to momentarily shut 'er down in flight, as it had hit the bottom of what the voltage regulator could do to power the flight system. So she browned out and put my helicopter into autorotation.
I could “patch” this by setting the minimum arming voltage to 7.8V instead of 7.7. But that would not fix the root cause of the problem, especially if the generator failed in flight and I had to bring it home just on what’s left in the battery. There is ~5A load on the system with electronics, servos, radios, high-powered FPV transmitter, payload. If the generator fails it doesn’t take but a few minutes for the flight systems power to sag below 7.5V with everything operating.