 Thanks for the heads up
Thanks for the heads up 
Moving to a tiltrotor design allows us to lose the rear motor and we are just finalising the design of the parachute launcher. It fits into the cavity the the motor insert normally occupies and then protrudes from the rear of the fuselage. The firing pin and springs are mocked up here and is not representative of the actual mechanism we are using. There is a plate, attached to the shaft, that will push the parachute out and a cover at the back of the tube that pops out when the parachute pushes against it.



The assembly will be SLS printed and is designed to use an EMax ES09MD servo.
1 Like
Autonomous tracking update.
We decided to implement this as a 3 part system consisting of the IRE (Image recognition engine), GMM (Gimbal management module) and the DPS (Drone positioning system). The systems use mavlink or socket connections to communicate and can be run on a single or multiple companion computers.
The GMM is responsible for controlling how the camera operates (fixed position or sweep pattern) during patrol. It also queries the IRE on a regular basis and gets a null response when there is no identified target or an X:Y coordinate (image position on the sensor) when a target has been identified. The GMM’s role is to make sure that the gimbal is moved so that the target is as close to the centre of the frame 0:0 as possible at all times. We are planning to make the GMM code available for others to use.
The DPS module waits till the GMM tells it to go live and then continually calculates the target’s position in relation to the drone and ensures that the drone lointers around the target. Due to this be a very controversial function, we have decided not to make the DPS module code available to avoid it being misused.
1 Like
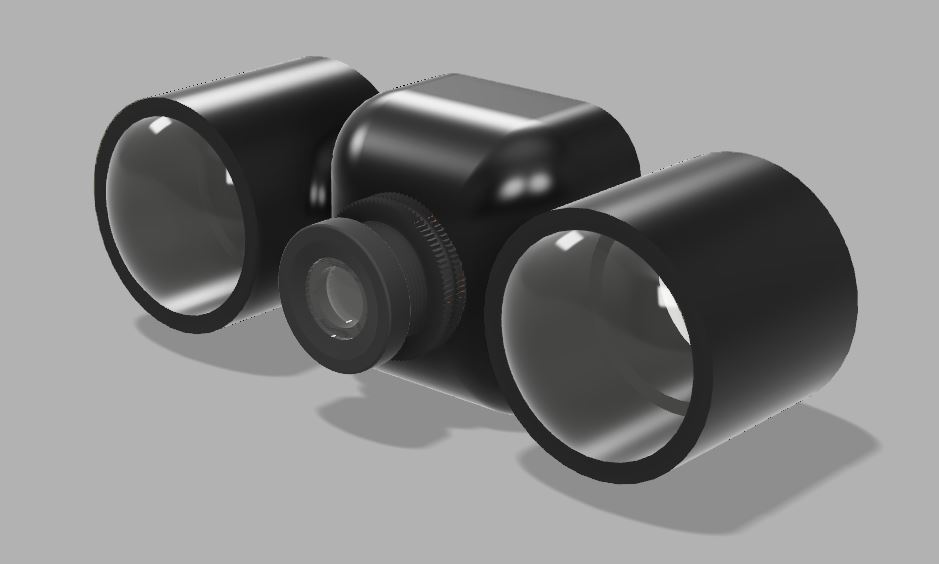
Graham Dyer raised a concern, which we were aware of and that is the fact that a thermal camera becomes unusable when the air and ground are as hot as the target. We are addressing this in two ways. Firstly this unit is permanently mounted under the UAV’s nose and it is a housing for a RunCam Night Eagle Pro 2 with a 5w Oslon 960nm black IR led on either side of it.
We also have a mock FLIR VuePro body that can house a high res lowlite IR cam and again with high power 960nm illuminators. If the ambient temperature is too hot for the FLIR to be effective it will be a simple matter of swapping out the 640 for the IR version.
1 Like
I have no idea what your budget it on this program, but the military uses cryogenically cooled Infrared imaging systems in order to combat just that. There are many new systems out there that don’t require “as much” cooling to still give a high fidelity, precise, images.
We unfortunately don’t have the budget for military spec but the issue is that the air around the target can be as hot as the body so its a scene temperature problem. Cooled sensors definitely help reduce noise and improve clarity but you still need a thermal difference to be able to distinguish an object from the surroundings.
Shooting dye, bullets, or laser beams is just about rules of engagement, not ethics. Stop the poachers the most effective way you can within the existing rules of engagement, then work to change the rules. In much of Africa the thermal signature of rocks and other natural objects will mask humans. You will need a dual band sensor to track humans. The ratio of midwave and thermal bands is a good starting point.
Fortunately the poachers, in the area this drone will patrol, are very accommodating and only enter at night which helps us a lot. We spent a lot of time ensuring this UAV owns the night.
Our experience has been ground temperature very nearly human at night fall, followed by selective cooling with “hot rocks” and other features masking the detection. We can “detect” on motion, then attempt to “track,” but still very difficult with a single band system. If you want to learn more and improve your system, send a note to info@KashmirWorldFoundation.org
Thanks, will drop you a mail tomorrow.

Hi Robert, like to talk to you about this offline if you are interested. I have years of experience with UAS and tactics & procedures for surveillance & reconnaissance missions. aj@majorconsultingusa.com
Hi Anthony
Thanks for making contact and I am always happy to talk to anyone who can possibly help make this venture more successful.
Regards
Robert
Would you by any chance be making your tilt mechanism available to be 3d printed? very clean design and great idea to mount parachute where original pusher motor goes.
Hi, we most probably will do once we have fully tested the mounts.
Just came across this spam^h^h^h^hpost on DIY drones, this type of camera might be interesting for this application?
1 Like
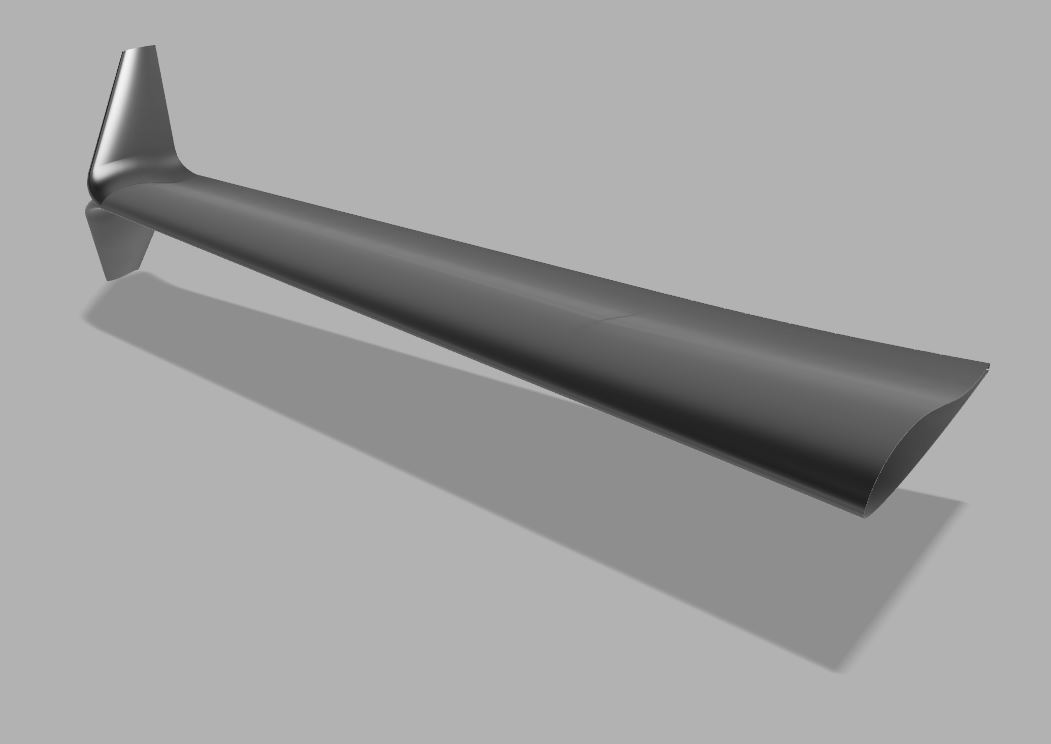
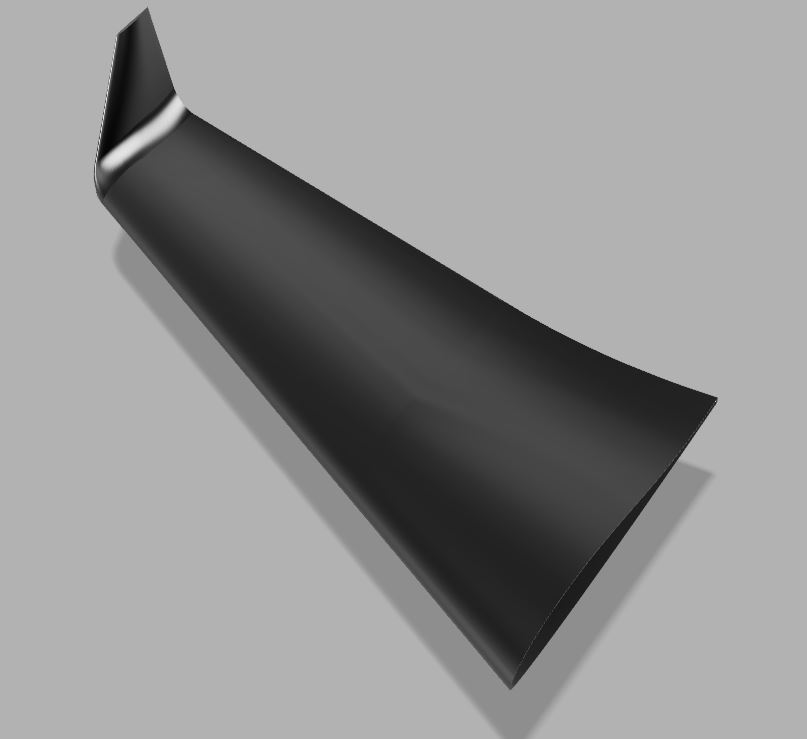
We hit a problem in that the Skywalker’s EPO wing wasn’t rigid enough to handle the twist from the VTOL Spars so here is the cad model for the all new full SLS printed X8 wing.
1 Like
The Skywalker is a horrible wing, don’t copy it, start from scratch.
Yep so the new wing starts off with an 8x airfoil to match the X8 fuselage and then goes to a HS520 airfoil
1 Like
Hi Robert, howzit going with the project? Is your VTOL working out?