Hello every one,
I am working on rover robot with:
- Chain robot as shown in the attached photo
- Cuav x7 autopilot (just for test)
- Cuav RTK 9P
manually, every thing good.
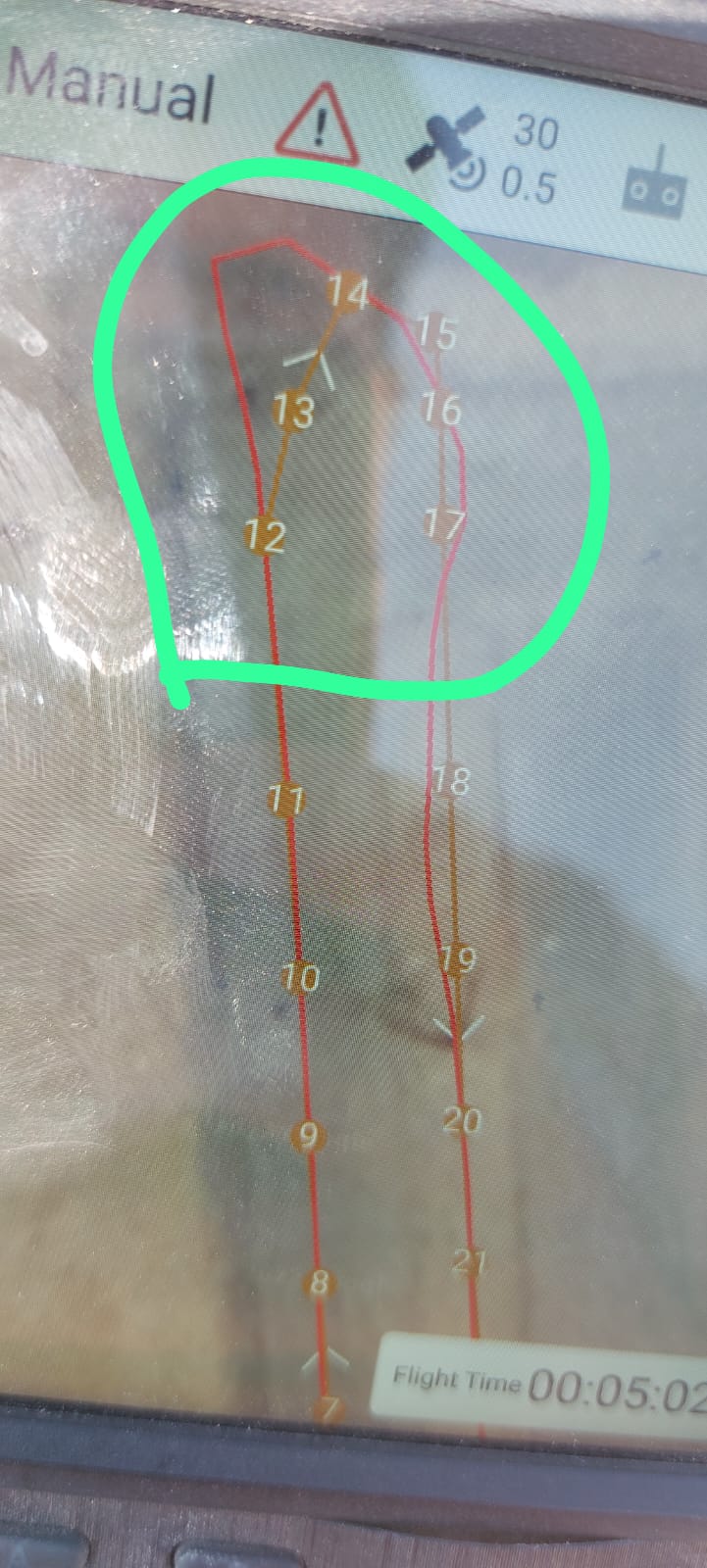
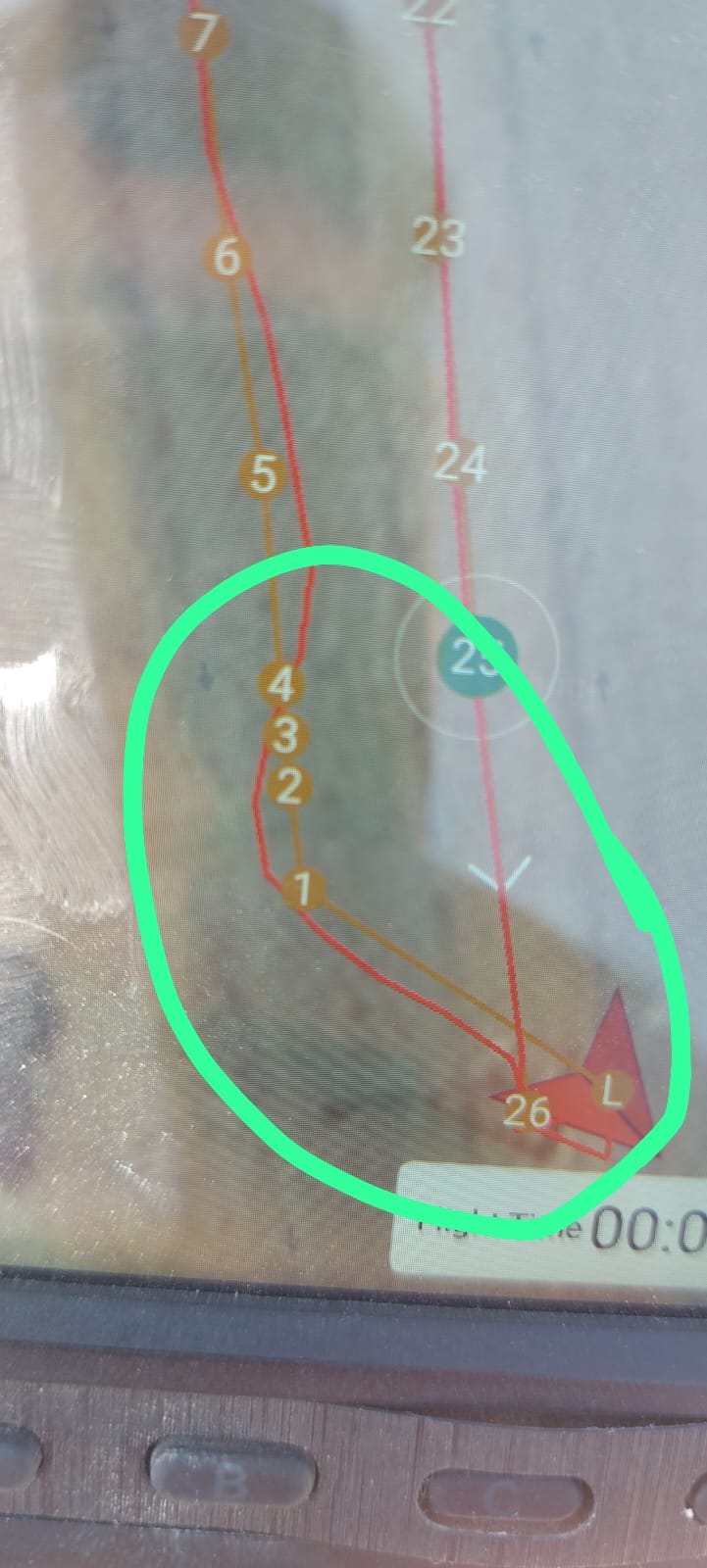
But with auto mode the robot do bad turning path as explained in the attached photo.
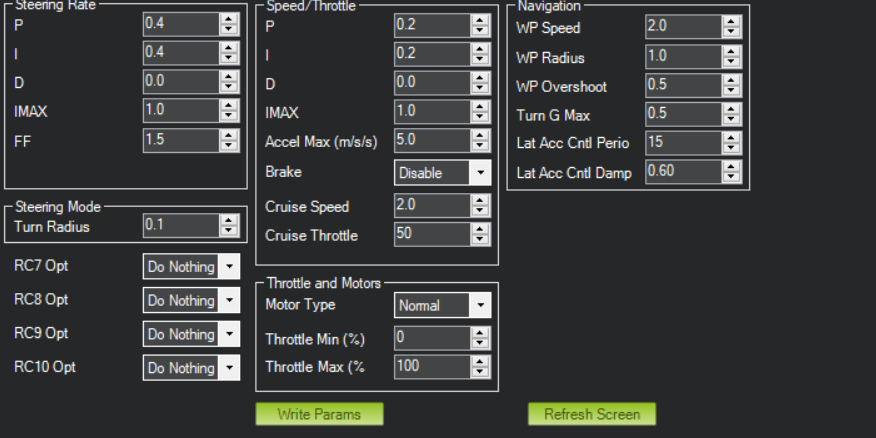
I try change the values of navigation tuning but I didn’t get good results, the best parameters values I get after many experiments shown in the attached screenshot.
Also the robot don’t care about it’s yaw angle, I want to know how to tell the robot to take its yaw angle into consideration in order to have good turning and good path?
Looking for your help.
Thanks.