@tridge Are there any videos (or videos with logs) of anyone doing a truly perfect auto-land with flare and soft touchdown? I haven’t seen any. I’ve looked and can only find autolands that “work” but there is some small bouncing or landing near parallel or 0 AoA. Nothing with a nose up descent is shown anywhere. I’m wondering if one, that’s possible or two, anyone has ever done it or at least shared publicly that it’s been done. I’ve seen one video of an expensive commercial system running arduplane that has a true perfect autoland but there is not confirmation if it was done actually autonomously or if changes to the code were made. Lots of attempts out there, no one shows it actually working spot on. Would love to hear thoughts or see something from anyone.
The softer I can get is here :
Which system are you talking about ? Delair UX11 or ebee ? None of two are running ardupilot …
Check out the last 30% of this video:
Thanks. That’s ok but the second landing has the guy on the sticks so that’s not completely clear if autonomous or not. The fact that I can’t find anything is honestly somewhat troubling given this is probably the trickiest part of the flight process and the autopilot should be able to compensate for how much wind is present. That’s a huge issue and concern. Nosing up in wind is essentially a climb so it needs to be done less.
I’m always amazed at how little visual evidence there is of good landings. Actual good ones. Soft, nose up flares. No bouncing. Etc. it should be the standard. Not the exception.
The second landing there was the only non-autonomous landing. I think you are expecting a bit much of these aircraft.
There’s a few reasons I say that… Landing nose-up is ideal, but it takes a LOT of finite control and “feel” for small aircraft to land that way. You have to be at the perfect, and I mean perfect speed to be able to go nose up without increasing altitude/floating or stalling and falling.
In addition, ground-effect changes flight dynamics during touchdown. Do you expect an autopilot to compensate for that?
If you expect a smooth touchdown, you have to have a lot of runway. With manned aircraft at only 2x the speed, you will expect several hundred feet for a very smooth touchdown. If you want to be more accurate, then the landings are often harder and not as smooth. In the UAV world, accuracy is often more important than perfectly smooth. Ardupilot’s code is designed for accuracy landings, not smooth ones.
In addition, nosing up is totally independent from wind. Wind changes significantly close to the ground, so there are so many factors that can’t totally be controlled. Wind shear is dangerous. The wing loading on UAV’s makes them very susceptible to air currents. This isn’t a stabilized 737 after all.
I saw only one landing nose up … otherwise good landing !
Off topic what is the second white gps present in video ?
maybe the code has improved since this thread was created - this is arduplane 4.1…
@Allister
Adding a new question here related to “flare”
If I want motors continue to provide 30% thrust during flare should I change Thr_Min to 30, that way motor will continue to provide thrust?
Also, does this means when I arm the plane in FBWA mode on the ground its going to start taxing?
Have you set up landing PF (pre-flare) or LAND_THR_SLEW? I wouldn’t change the THR_MIN.
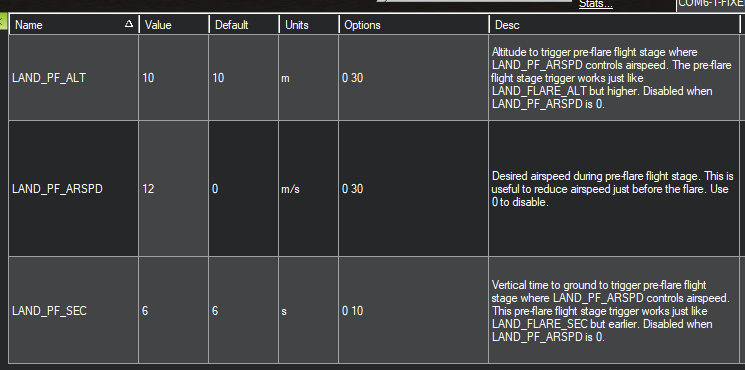
Here are the PF settings, the only change I have made is the airspeed:
I don’t understand the meaning/defination of “SlewRate”?
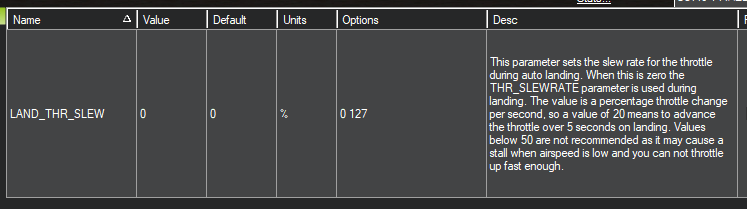
SlewRate?
If I understand correctly, Slew Rate is a change in throttle value, so should I make the value 25%/sec? But which one to change “THR_SlewRate or Land_Thr_Slew”?
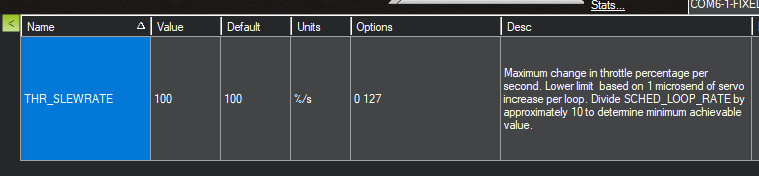
If you’re just looking at the landing then don’t touch THR_SLEWRATE.
Slew rate is how quickly the throttle changes can happen. Think of it how hard you’re hitting the gas pedal when the light goes green. Maximum change in percent in 1 second. To use the example in the description another way, a value of 20 will make changes to the throttle a maximum rate of 20% per second.
This is used because some planes can’t take hard fast throttle changes. If a plane doesn’t have the control authority to manage a big spike in torque the slew rate will prevent the plane from flipping over when the throttle is advanced. Also some gas engines don’t like full speed throttle changes.
If you haven’t got the PF dialed in, you might want to focus on that. That may indirectly give you the throttle performance you’re looking for . Are you using an airspeed sensor and rangefinder?
Got it. I’ll work with PF first. I am not using range finder nor an airspeed sensor. Astonishingly, the plane has been landing without ripping the landing gears off. It just that I am noticing that the throttle cuts off 5 to 6 ft off the ground. If I can keep the throttle 25% ON it will make a better landing. Atleast thats what I think.
That sounds like when the plane enters the flare portion of the flight. You could also tinker with the LANDING_FLARE_ALT and FLARE_SEC. Problem is if you aren’t using airspeed/rangefinder you might want to be a bit conservative with how tight/low you make that flare. Lots of things can affect your baro over a flight and settings that might give you that perfect flare 2ft flare today might fly you into the ground tomorrow.
Thanks for all the help, I think I am getting there bit by bit. Here is the video from today.
I finally figured out that in the mission, my takeoff Alt should be set at 20 meter since TKOFF_ALT has no effect when flying a complete mission.
I need to increase ARSP_FBW_MAX to 28 so I don’t overshoot the waypoint and reduce altitude gradually in the mission.
Lastly, I forgot that the Land_Pitch_CD is in Centidegrees (3-degrees = 300-centidegrees).

Any landing that you can use the plane again is a good one. ![]() Nice work!
Nice work!
Try stretching out the last few waypoints so the grade is less than 10% for the the entire descent. I see at one point the plan is nearly 14% and it’s possible the plane is trying to catch up on the altitude the whole time. Look at the log and compare the actual altitude with what you planned.
Looks good for a first attempt but the
- approach “corner” is too tight and the plane cannot follow with the wind,
- the final descent that you try to model with waypoints is too steep,
- the hold-off maneuver modeled with the pre-last waypoint can be done via TECS_FLARE_HGT
You could seriously enhance the whole sequence with loiter to altitude with the tangential exit flag set. For whatever reason, docs don’t contain the “EXIT” flag.
You may want to try QGroundControl. It does that by default.
I’ve been doing this for month because I have to pass through a row of alley trees in front of my chosen flying field. And those stand 10m aside while the plane is 1m wingspan.
EDIT: One thing that I just saw. You make your assumptions on the Groundspeed in your OSD and then change airspeed settings. Instead add Windspeed and Airspeed to your OSD. From what I see in the footage, you probably have 40km/h of wind and the real airspeed is 50km/h.
I had TECS_FLARE_HGT at 2 meters during the last flight, I am going to change it to 1 meter.
Loiter to hold is a good suggestion.
I did use QgroundControl several years ago for autonomous flight, I think I have a video of that on my channel, but had some channel and mode mapping issues between firmware so I am going to stick with MP (Besides Ardupilot Community support is awesome, and more micro flight controllers are getting qualified day-after-day).
This plane does not have a speed sensor or optical flow sensor. I used OSD values only to point out cirtain events for the video.
BTW, I have the flight log file in video format that I wanted to merge with the video, but for some reason, Shotcut kept crashing when I tried merging them together.
I think I got as good as it gets without optical flow and speed sensor in 20-30mph wind.

@Allister, When landing this particular airplane (Sonic Binary) in manual mode, I generally keep the throttle at roughly 25% until the plane touches down and starts to roll on the ground.
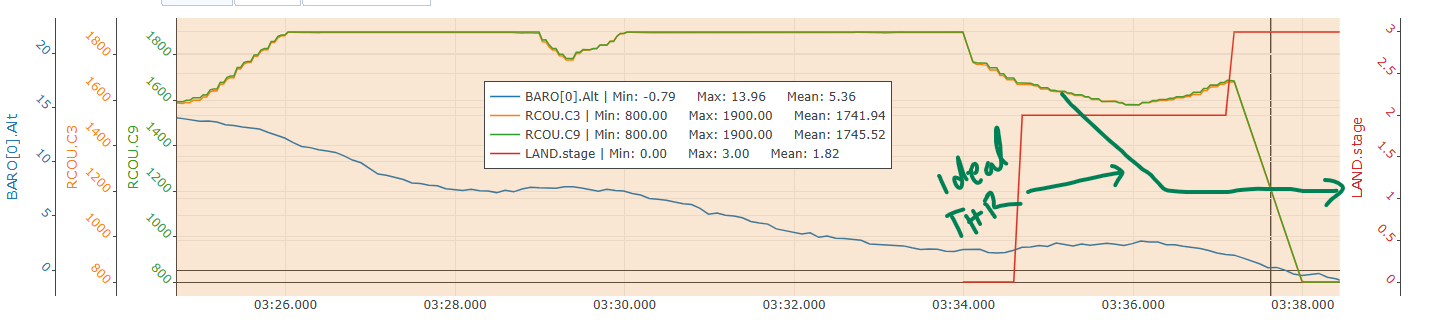
In AutoLand mode, the throttle is cut after the flare, would it be possible to keep the throttle at some constant rpm after the flare? I tried TECS_LAND_THR = 13 but from the video and log file, its cutting off sharply as seen in the graph below. I drew a line in green what I wanted.
I guess what I am asking is there any parameter that can keep the motor spining after flare and landing
IMO, you can only disable flare completely to achieve that behavior.
Means
LAND_FLARE_ALT,0.00000000
LAND_FLARE_SEC,0.00000000
, but I’m not sure if it then actually switches to the sink rate controller.
TECS_FLARE_HGT,1.00000000