Smart idea for a script that automatically adds a DO_CHANGE_SPEED before corners. Can you share your script to do that? (I assume it’s Python?)
Imagine a RC car with two receivers, one attached to steering and the other to accelerator/brake, with two drivers trying to control it: coordination impossible
Of course it is possible; this is exactly how I taught my 4 year old son to drive his R/C car. I put him on a buddy box with me controlling throttle and him controlling steering.
I think spline waypoints would fix this and, in turn, the OP’s fundamental problem.
If someone with a 8K TV or 8K monitor wishes to test a mirrored 8K version of the rover with three drones video mentioned here
here it is:
(coded 30fps 25Mbps)
This is another similar 8K one with more image movement (minis car race).
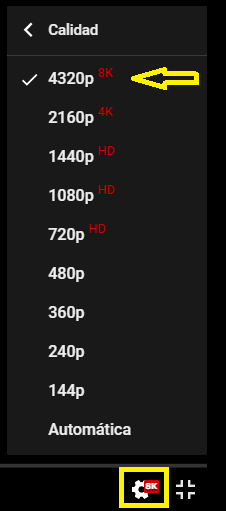
Choose 8K:
This is another 4K three laps video on the same circuit:
but not using RTK or running a mission, since the satellites positioning:
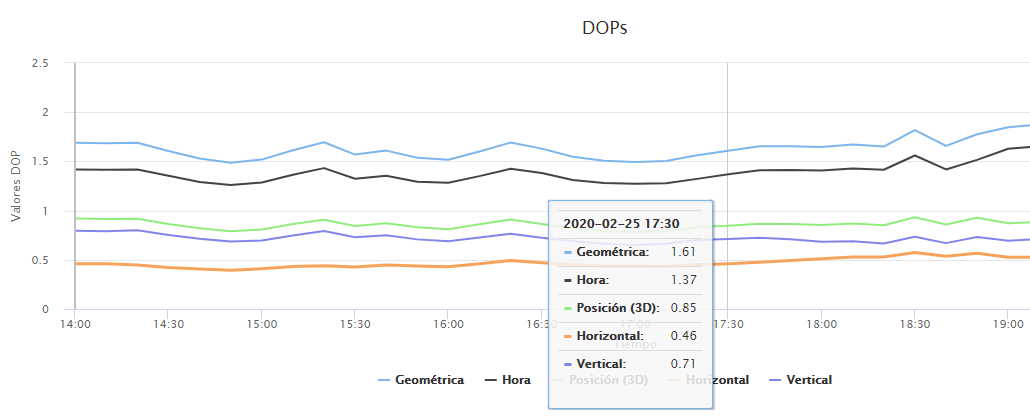
was not good.
This is a mirrored version of the same video.
This was a test of live Twitch on board camera transmission with an HDMI 1920x1080 encoder and a 4G dongle, as seen on the second part of the video, just as on board cameras on the F1 cars, but without using an helicopter (helicopters are very expensive and cost a lot of money). BTW, the transmission was interrupted, so there are two on board video intervals.
For having RTK and 4G transmission at the time in the field, note that two 4G communications (two SIM’s) are needed.
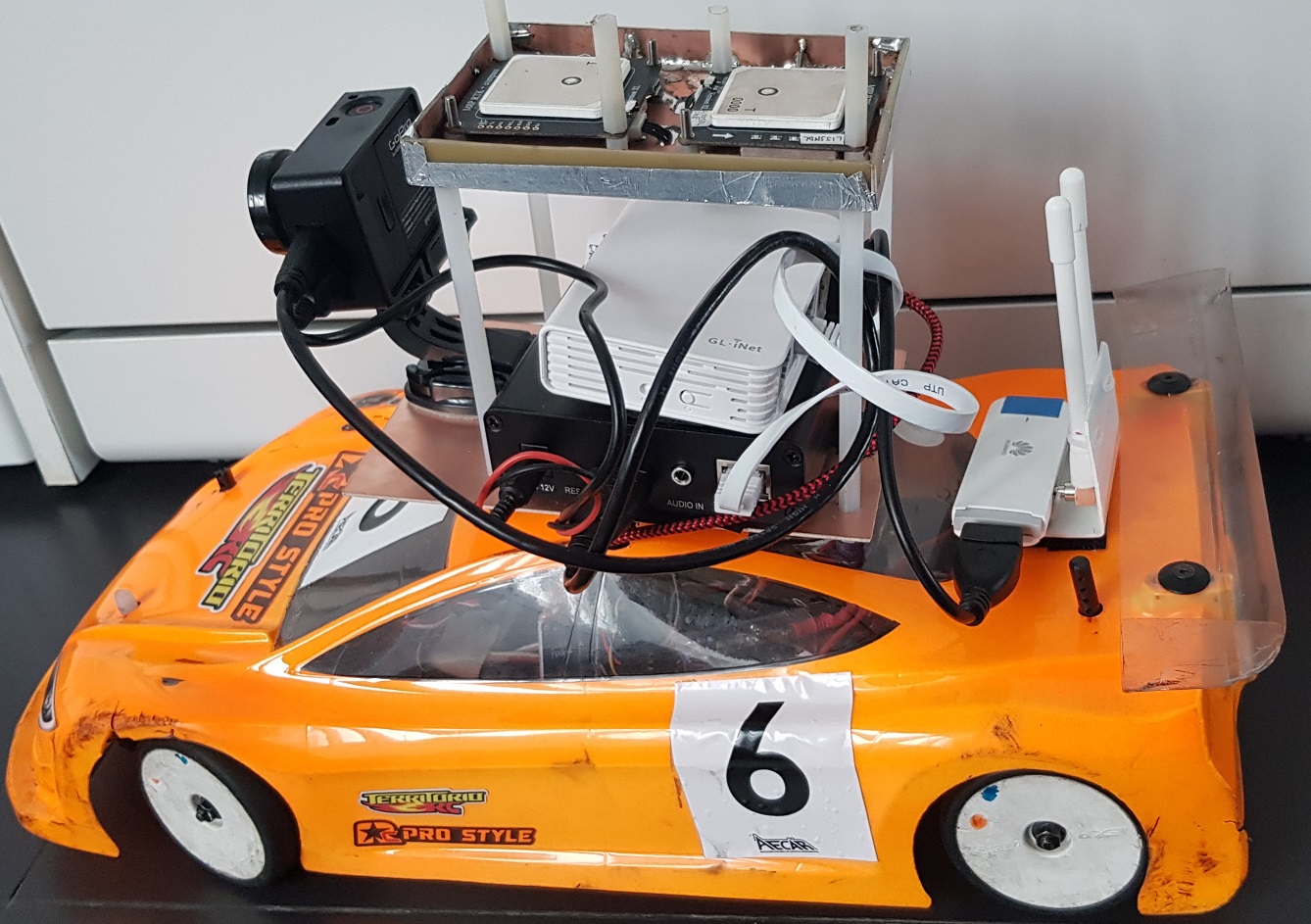
This is a view of how camera, encoder, router and dongle fit in the car (1/10 scale). They could also fit on a medium sized drone, for a live transmission. This is not valid for FPV, since the delay is moreless 20 to 30 seconds. Perhaps with a future 5G dongle FPV this way will be possible.