These are similar trajectories and videos (4K), but with rover firmware 4.0.0-rc1.
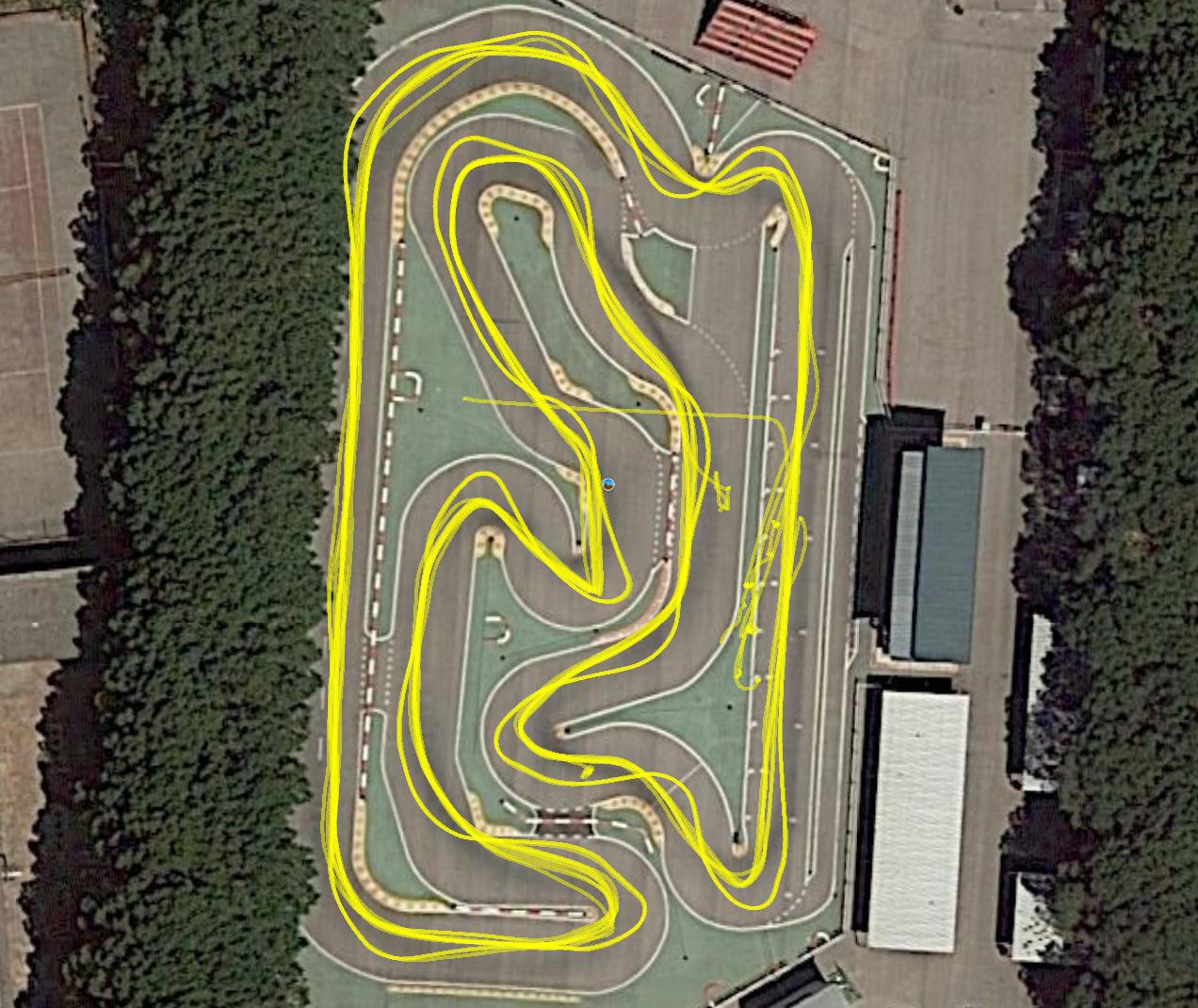
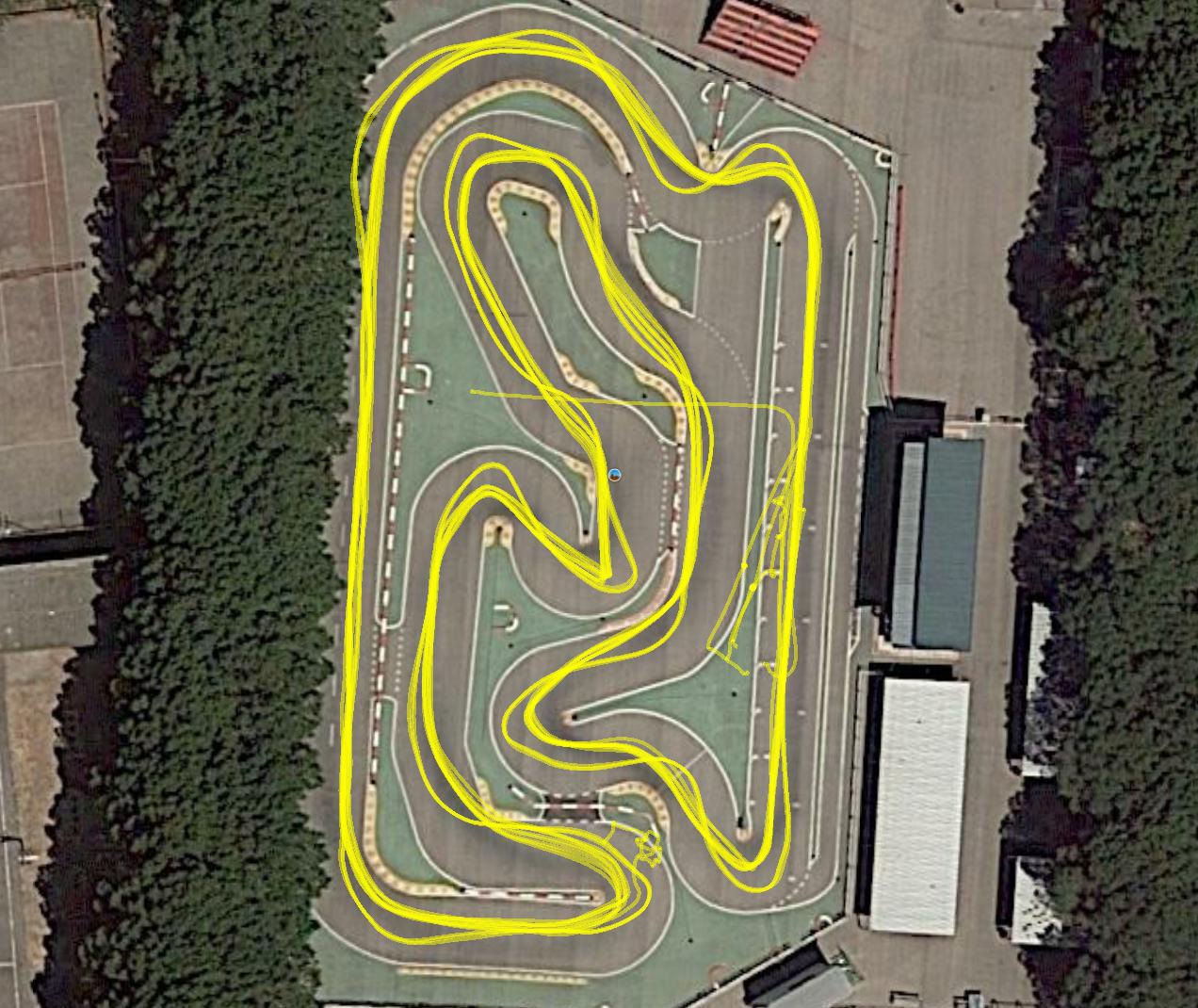
Rover trajectories (outer) are tighter than in previous version. This gives room to increase speed (still fixed), perhaps to 3.5m/s, and so shorten mission duration (battery duration is critical for two of the drones, as can be seen).
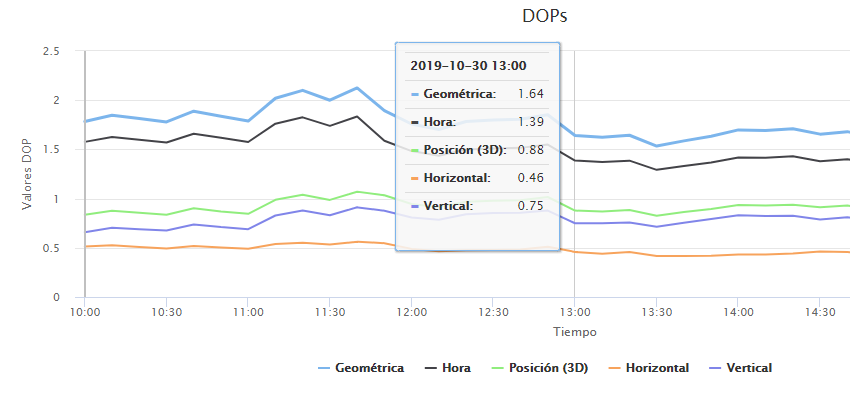
All this was on a good RTK GPS day: