Two other simultaneous missions 4K vídeos and trajectories, now with 4.0.0-rc2 (for more information see this (3.5.2) and this (4.0.0-rc1)):
All at 3.37 m/s.


Drones QuadX-1, QuadX-3: 3.3 m/s (reduced trying to follow the car)
Rover-5: 3.37 m/s
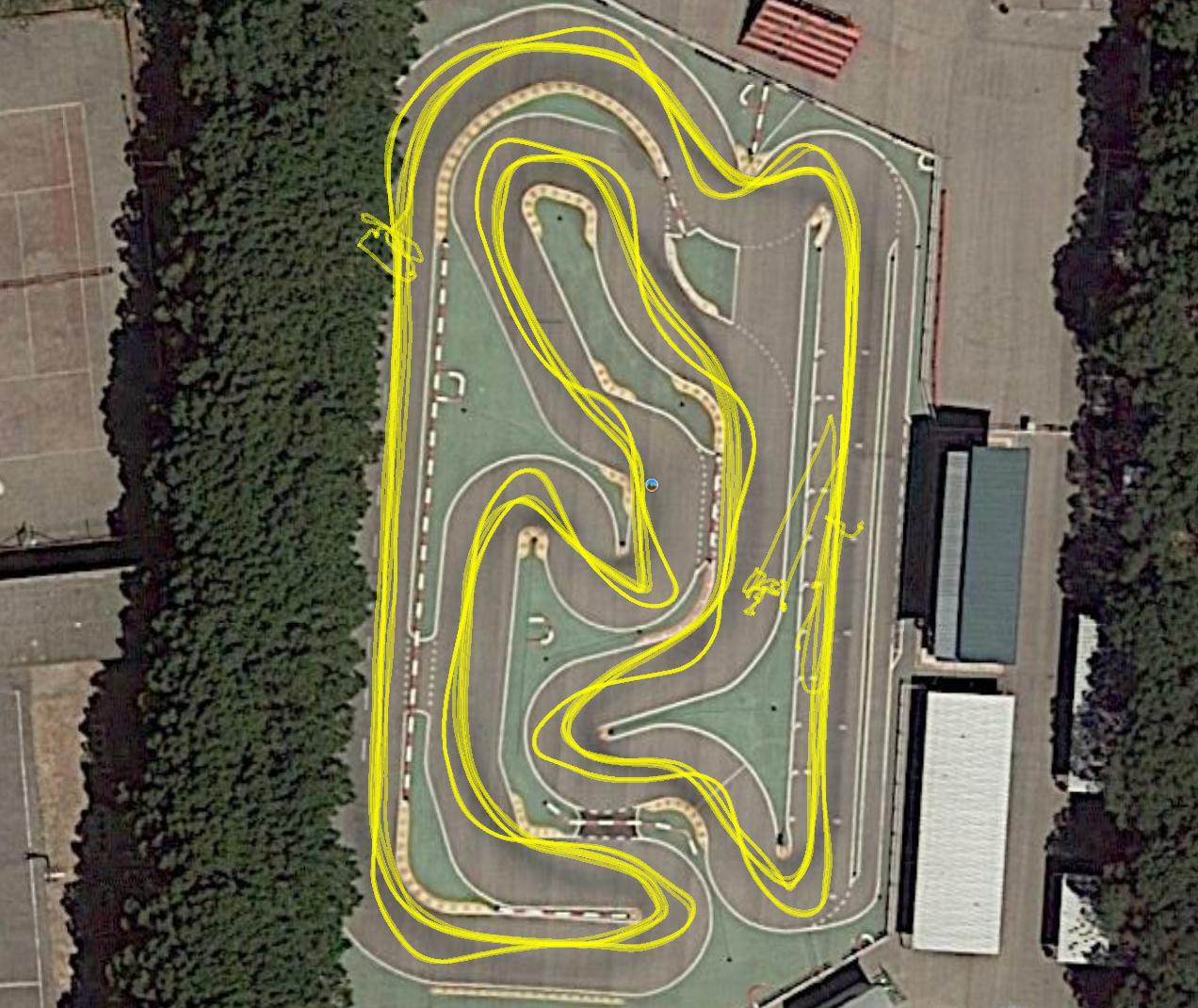

(QuadX-1 (the one that does not complete the mission) follows closely the car; QuadX-3 is faster)
The car speed increase (3.3 to 3.37) is noticed in the trajectories. At 3.4 m/s the car hit the external barrier at the second curve after the long straight, but at 3.37 m/s it passed.
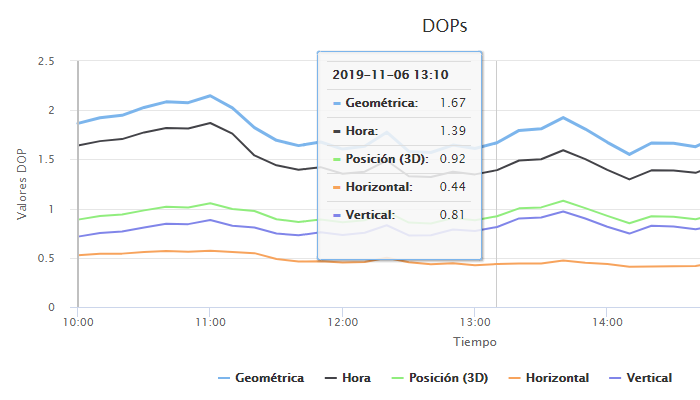
The satellites position was also good: