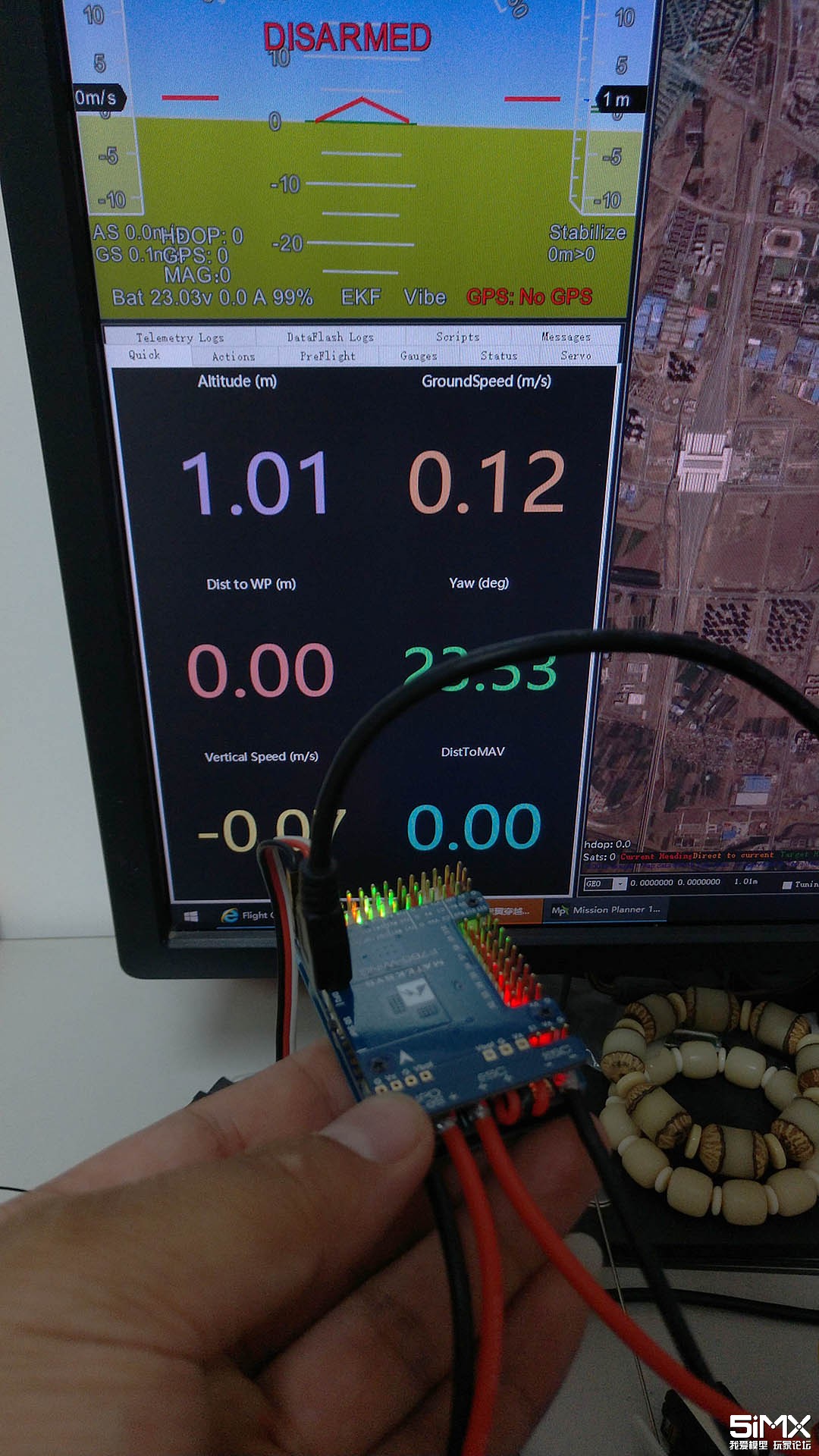
I saw that the Dev firmware list already includes support for the 4.0 Dev MatekF765 wing. Although I know that the F765 wing is a flight control designed primarily for fixed-wing aircraft, I am delighted to see the Heli branch in the firmware list. The bold download of Heli firmware has been brushed into the latest F765 wing flight control. According to the instructions, patiently set all the links from scratch, basically very smooth, and happy to see more accurate voltage and current detection. Then, I took out the cloned version of my T-rex500, according to past experience, connected the equipment, and set the details according to the requirements of the body. This afternoon, I simply carried out the first flight test, indicating that the stable mode flight was successful. Prepare for subsequent testing of other flight modes.
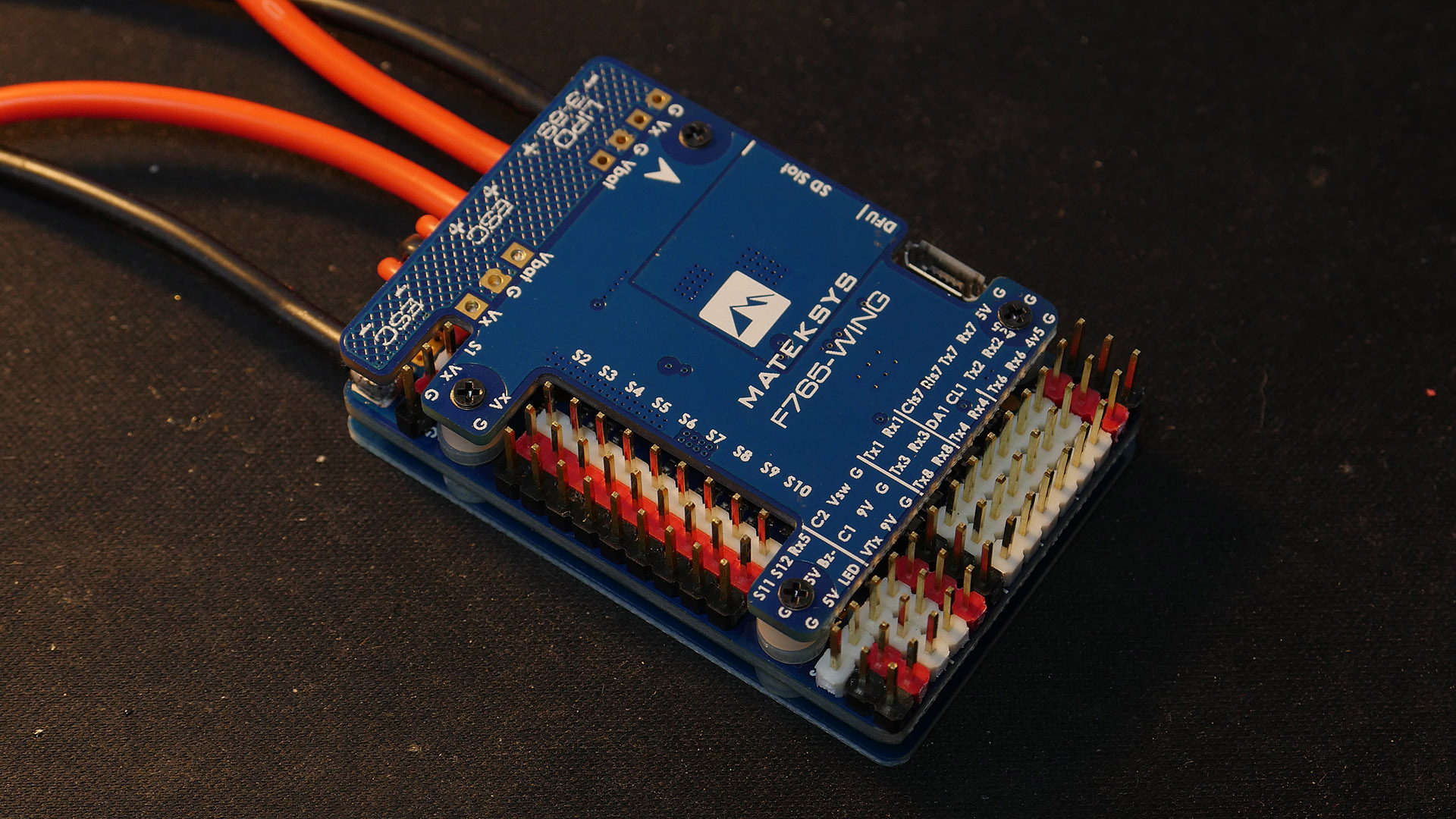

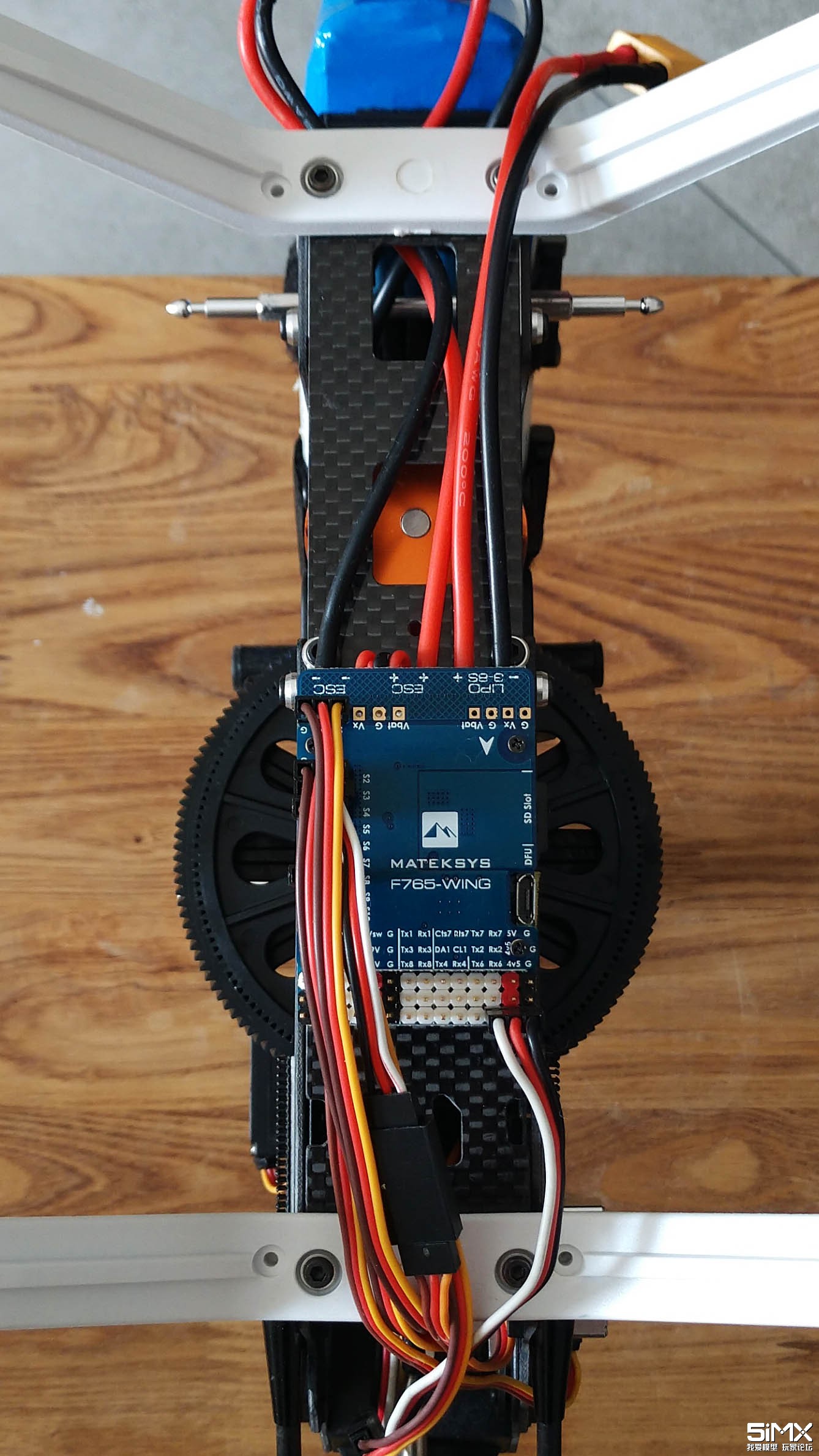

I want to know what is the big problem with 4.0 Dev’s heli firmware. When can I become a beta version of the firmware, or whether developers are concerned about this flight control? It has a relatively high price/performance ratio and processor speed. Also very good, the built-in Bec, OSD, voltage ammeter are very good, and suitable for more convenient wiring and FPV flight.