Thanks for sharing this series; very helpful. Regarding changing the motor direction, you mentioned using the SERVO_BLH_RVMASK parameter. I could not get this to work on my build …4.1.3rc. Did you also have to interchange motor leads? That’s the actual solution mentioned in the wiki - “Motor Direction is reversed simply by interchanging two of the three ESC to motor power leads.”

That parameter is a bit mask. Do you understand what a bit mask is?
Worked fine on my build with 4.1.2. Changing motor leads is a pain - I always solder it up to look neat and then use BLHeliSuite (old way) or RVMASK (new way) to change direction as necessary
Thanks. With my quad X, motors #2 and #3 are spinning in the wrong direction. In Mission Planner, these are the settings I have applied - with no effect.
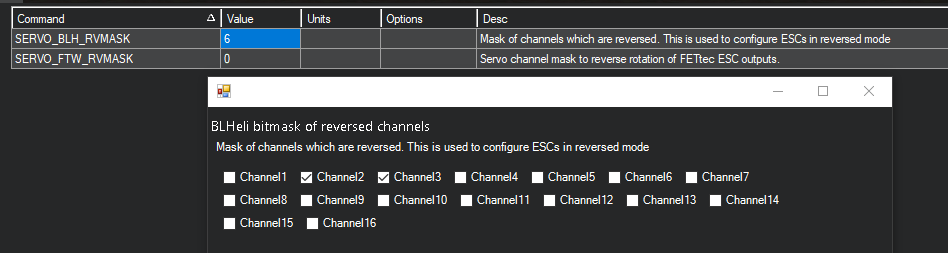
Perhaps, I have the motor #s wrong?
Probably not. Can you give a layman’s explanation as to how they work (vis-à-vis the use of this parameter in configuring motor direction)? Thanks.
Do you have SERVO_DSHOT_ESC set? It could be that you have the wrong channels.
Yes, I have it set:

I’ll go through the settings once again, to see if I am missing anything. (btw I using the same FC + ESC in your build).
What do you have MOT_PWM_TYPE set to?
MOT_PWM_TYPE is set to 6.
FRAME_CLASS = 1 ( Quad)
FRAME_TYPE = 12 (Betaflight X).
What’s not clear to me is how the ‘Channels’ map to the motor #s below. (I thought @amilcarlucas was going to share some insights).
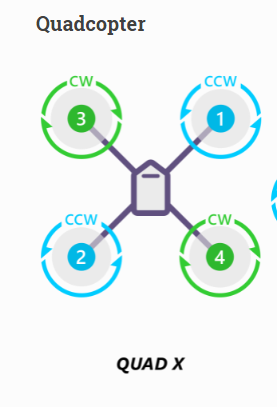
I had to experiment to figure out which mapped to which - it’s not obvious from the channel or motor numbering
So, I was able to get it to work. Apparently, depending on the frame type / class, the motor numbering changes. With my config (Betaflight X), I had to use the Betaflight motor numbering scheme (NOT the one on the graphic above). Not very intuitive, IMHO).
Thanks  .
.
Hi.
very very detailed, well done ![]()
Compas+mot calib = internal error - can’t we wait for the fix?
Why you using EK3_MAG_CAL,0 - copter need using 3?
very very detailed, well done
Thanks
Compas+mot calib = internal error - can’t we wait for the fix?
The fix Peter B had did not seem to work
Why you using EK3_MAG_CAL,0 - copter need using 3?
The original setting was because people were taking off from cars and iron rich places, but it leads to annoying yaw resets so I tend to turn it off
those. i can also set it to 0 and is it ok for the quad?
And please say what about unstable yaw - there are small twitches in different directions - how can I fix it with pids or filters?
And i’m see from discord, that you have unstable RTL for 4.3 dev - did you find a reason?
those. i can also set it to 0 and is it ok for the quad?
Yes if you have done a good compass and accel calibration
And please say what about unstable yaw - there are small twitches in different directions - how can I fix it with pids or filters?
Make sure you do the Yaw D tune - details in the blog or my conference talk. Small twitches are also usually a signal that loop rate filters are too low, but make sure your build is low noise or you will smoke your motors if you go higher. See https://youtu.be/jK0I97dMsK0
And i’m see from discord, that you have unstable RTL for 4.3 dev - did you find a reason?
I think its due to accel biases accumulating during acro flight
I don’t understand what it is :), but you didn’t have such problems on beta3?
a year ago when I was flying on AP in acro and then quickly switching to RTL - the copter just landed in that place ![]()
I’m find good place for compas 1-2% noise at full throttle -
This is geprc crocodile 7 inch. + external compas lis3mdl at 3d printed tpu.
There is a long standing bug that means accel biases were applied incorrectly on flight controllers with two IMUs.
@andyp1per Great video series!
In video ‘ArduCopter 7 LR Build Video 17 - Pre-flight Checks and First Flight’ 17min 20 sec you plotted Rate - ROut and POut and mentioned any oscillations should be below 10%.
Could you please expand what ‘Rate - ROut and POut’ are and why they should be below 10%. My guess is that they are Pitch and Roll P?
Thanks
Peter
Here’s the description of the RATE log message:
https://ardupilot.org/plane/docs/logmessages.html#rate
1 Like
Thanks for the link, very helpfull!