Stick a fork in me - I’m done!
2 Likes
See my video on yaw tuning - will probably help.
2 Likes
Thank you Andy for this was an excellent series of vidoes 11 out of 10 whats next please,maybe try and get a hexson 450EDU and cube orange and do a series on that,as it is a very popular frame and comparable with other frames. Justin how good is it to have Andy as A friend and do have his knowledge and capability to alter code to help tune and thank you as well for helping us all geta decent tune.
So its Andy Piper’s tune or play the bag pipes and have a tune. Thank you both for this Ardupilot rules the skies
1 Like
I have now setup two small quads. Using this thread thank you.
I’m having a weird issue with both quads, at take off (quad seems to have good home position) sometimes the quad tries to fly forwards as if I’m giving full forwards stick, but in fact I’m trying to counter it. When I see this I don’t take off but can see it trying to lurch forward at 25% power, any more power it flips forwards. Then I unplug wait a minute then replug let the quad fully restart then the quad is okay and everything works all autonomous mods working.
Need a log to be able to comment
Okay. I have clearly missed a step. The yaw is still very sloppy. It overshoots and is slow to initiate. Roll and pitch are super locked in. They feel great.
I have adjusted the D term to try tighten it up but that must not be the correct parameter. Multiple Yaw auto tunes. After a few hours in the sun I’m seeking help on here. If anyone has thoughts or opinions on what I’ve done wrong it would be appreciated. Parem’s and a log of me applying gross yaw movements attached.
Rekon7 V6.1.param (25.5 KB)
Did you follow the video on yaw tuning?
I think I’m an idiot!!
Clearly too much sun today. Having a beer and reading the Tuning Wiki again. I haven’t adjusted my P term again after adjusting the D on my Yaw axis.
I’ll also try reducing my Yaw Acceleration slightly to help with overshoot.
I’ll try again tomorrow.
Thanks for your reply Andy! Your video is super detailed. It hurts my brain.
Ok. I have isolated my issue. Began the tuning process from the start. Good results. An increase in the YAW error to 9.
But…When I have ATC_ACCEL_Y_MAX at 0 the vehicle responds as expected. Not as tight as I would like but good enough. The only issue is the height gain on aggressive yaw maneuvers which I assume is related to ATC_ACCEL_Y_MAX not being set correctly throwing out the loop.
Following the guide to calculate the recommended number (roughly 65000) the copter returns to being sluggish. I did a gross error check either side of that with lower numbers producing poorer response and higher numbers making no difference.
Does this mean I am still terrible at tuning or I have missed a step?
I apologize for all the questions but I really am stumped.
Post a log showing the problem
Logs linked below. Thank you in advance.
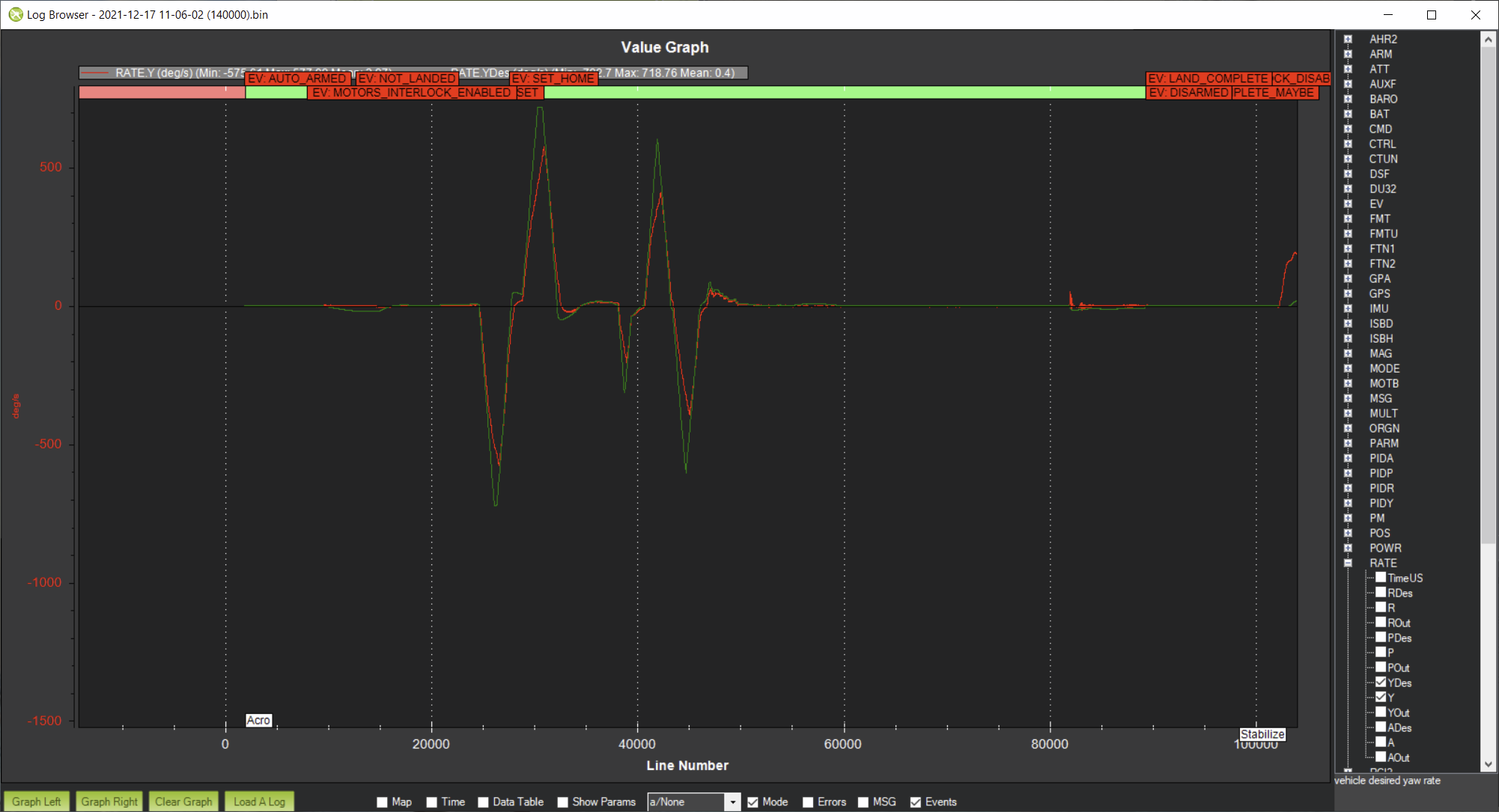
You are getting to 600dps in about 0.6s, so accel is 600/0.6 = 100000cd/s/s so you should set ATC_ACCEL_Y_MAX to this
OK. I gave that a crack and it made some difference. But not enough. Being new to this I’m having trouble understanding how to bring actual yaw rate and demanded stick commands closer together. I understand that the vehicle has a maximum yaw rate it can physically achieve. As per the video and blog, I graph the results and it then allows me to tell the FC what it should be expecting.
Attached are a bunch of logs at different ACCEL rates:
https://drive.google.com/open?id=1-FCHorTlSyXjpnFVLbwTOi5fV0S9HCms&authuser=longrassjosh%40gmail.com&usp=drive_fs
Am I correct in assuming I can’t leave ATC_ACCEL_Y_MAX=0 as it will impact flight modes that aren’t Acro?
I am using an X Config (FRAME_TYPE=1) instead of a Betaflight config (FRAME_TYPE=12). Does that make a difference?
Should I update from Copter4.1.2?
Apologies for being a pain. I have clearly missed a step. It is a steep learning curve from Betaflight and Inav.
Rekon7 (ARDU 4.2.1).param (25.5 KB)
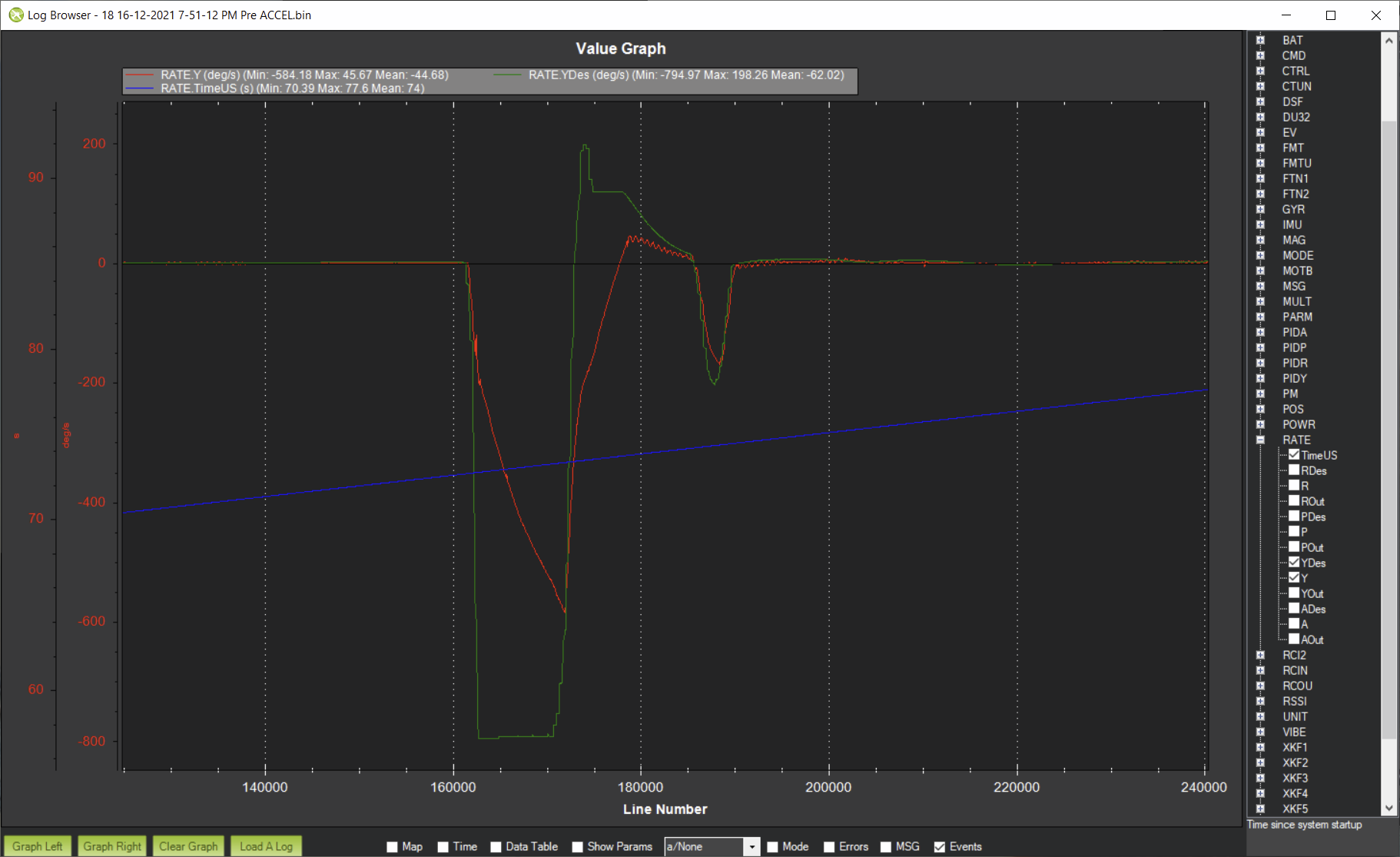
You can see at 140000 the copter is struggling:
Its able to initially track because you are relying on the motor bell acceleration but after that the requested and actual yaw diverge. You can set it to 0 if you want, but you will find that you get a lot of overshoot and probably oscillation slowing down since the copter is not able to meet the demanded requests and the controller gets confused.
I suspect this may be more pilot feel. You really need the new expo settings (what betaflight calls “super rate”) - if you tell me what flight controller I can give you a build to try.
1 Like
Thankyou so much for your help Andy.
This gives me confidence I can interpret the graphs. I just don’t know what is optimal. There is obviously a lot more inertia on a 7" to a 5" frame which wouldn’t help with overshooting.
I have a Matek 743-Slim and I’m more than happy to try something different.
Again, Thanks so much!!!
Excellent. Thanks for the opportunity. I have another vehicle exactly the same because stuffs hard to come by here and I figured I’ll need spares over summer holidays.
I can do a back to back and see how I like it. This will be a good.
I’ve change the ACRO_RP_RATE =850 (betaflight setting) and ACRO_Y_RATE=650. Or should I use a log and plot demanded vs achieved to get accurate numbers?
I’ll try =0.4 for Expo and play with that until I find my happy place.
Anything else you recommend to adjust?
Again, I really do appreciate your time.
RATE is maximum pilot demanded rate rather than acceleration so fine to go high. I have mine set to 600dps on both. 850dps in a roll is pretty quick - I tried that and had done two before I could flip the sticks back so watch out.
Good pilots seem to prefer this expo higher so that it is soft in the middle and fast at the edges - I have mine set to 0.6 on both (not saying I am a good pilot - just copying those who are and it feels ok to me).
1 Like
I think I like your build Andy. It felt good.
I flew 3 different setups (Copter 4.1.2, Copter 4.1.2+, Inav 3.2) back to back and your build felt the best. It could of just been the higher rates). I too am no Mr Steel but the yaw just seemed lacking when doing inverted yaw spins and other manoeuvres where Yaw was pushed hard.
But the purpose of these 7" frames was to take advantage of Ardupilots full features in preparation for more complex vehicles and full Acro was a fun expirement.
I appreciate your help and I’ll consider this a success. If I want flippy flop stuff then Betaflight and Inav are easily flashed.
1 Like