Hi David, I guess the question is do any of these videos help you get to a better tune? On that FC I would say the main thing to do is make the MPU6000 the primary by setting EK3_PRIMARY=1
2 Likes
I’ve updated the blog with all of the settings that I used. I’m hoping to do a final tuning video once the weather allows me to test
1 Like
Thank you very much. Thank you very much. Thank you very much.
2 Likes
This couldn’t have come at a better time! Thank you for this.
I’ve just flashed my Matek H743 with iFlight’s 4-in-1 ESC and plan to test it out tomorrow with higher scheduler/gyro rates.
For compass/gps I definitely ran into interference issues. I got this 3d printed mount. I mounted the M9N above some Singularity antennas with a stand-off and placed some copper tape on the underside. The battery plug at the back is a bit… dicey; will see how this works.

iFlight make and sell a li-ion battery for this quad. It is 6S-2P and yes they are 15A cells. You need to adjust your flying style appropriately. Lots of reviews of these batteries in this very quad on YouTube.
This is a much needed blog. I am messing with 4 inch long range quads now with iNav (mainly as my 16 inch stacks do not have enough flash memory). All of these configurations suffer with poor GPS/Mag placement. Its such a compromise putting it on a mast as it makes the whole thing fragile.
I will move onto a 7 inch at some point. I think further back and higher up is the way to go with GPS/Mag. The front needs to be used for whatever HD can you are using.
FWIW I am currently getting good results with a compass mounted inside the camera cage at the front. Just need some good weather to do proper testing…
1 Like
Are you adding a discrete mag or just using a mag in a gps module?
A discrete mag - GY-271
EM fields from those battery leads will probably cause mag disalignment on throttle punches, or high wind situations/quick waypoint missions. keep us posted with a graph of mag please
Got my 5” build flying well. But one issue I’m have, is that the quad will not always get home lock? Even with +10 satellites. Is this a mag issue?
No, GPS issue. You could have 10 sats and still not have a good position estimate. Check for interference - particularly from video cables and cameras
@andyp1per thanks so much for this!
Extremely detailed videos and blog. I have been struggling all year to understand how to get a small quad to fly right. It’s a very dense build process but the results are far better than Inav.
My frame details are:
Rekon 7 (Although I recommend the Chimera)
Matek Slim 743
Hobby Wing 60A 4in1
Emax 2208 1300kv
Matek M8Q GPS
TBS Unify Pro 32
Ethix Cam
6S 18650 VTC6 LIION pack
HQ Prop 7x3.5x3
Crossfire and/or RFD900 for control
On Copter 4.1.1 everything works (Yappu, Smart Audio, LED, OSD) and with some minor changes to remove prop wash during Acro I’ll be happy. FFT mode for the filters is amazing! Previously using throttle to manage noise and I’ll never go back.
I also highly recommend this video to supplement anyone else struggling to get your quad to fly right.
https://youtu.be/iQ39QiEycIc
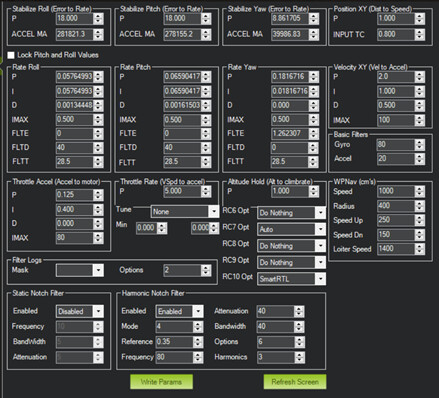
A copy of my Tune. I’m not happy with the Yaw error. I’d like to see it get into double digits. Don’t pick it apart. Reference only for other newbies as I’m new to this also.
2 Likes
Thanks. I still have a final tune video planned which will include yaw - but have been slowed down by the weather
1 Like
I do you have the telemetry wires shielded. The bn-880 board rate is from 4800 to 115200, but ardupilot automatically changes the rate to 230400 at startup. I think this is messing things up. Can I force 115?
Btw, I do have another bn-880 in my arduplane ZOHD nano talon and it works very well. Matek H765-wing
There is an option to force 115 but I cannot remember what it is.
GPS_DRV_OPTIONS I think.
Thanx, Looks like I’ll need a custom build to get that option on the kakute F7. Thanx
Added a video for getting the perfect tune. Enjoy!
2 Likes
I’m one of Andy’s ‘test pilots’ with an identical build. Over the last few weeks I’ve been providing him with logs and subjective feedback as he’s been updating his tune.
We’ve gone from a quad that feels ‘a bit wobbly’ to one that is now super smooth and locked in - and a genuine pleasure to fly FPV.
Being able to flick into loiter and take off my goggles half way through a powerloop to have a chat with a passer by is something of a revelation.
For anyone considering it, this is a fantastic project and if you follow Andy’s instructions carefully, you’ll end up with a machine that not only flies really well, but also has all of ArduCopter’s autonomous bells and whistles.
3 Likes