Hi @andyp1per - My copter finally flew yesterday! Yay!!! The quad loitered well with sticks in the middle, but in loiter when pitched froward it drifted significantly to the left. Of course, I had not set up the compass orientation correct.
Need some help with that and apologies in advance for re-visiting this question raised here.
FC is facing forward and GPS/Compass is facing back and angled at -120 degrees relative to the FC. In order to get the compass orientation corrected, I will need to use the following parameters. Please advise if they are correct:
COMPASS_AUTO_ROT = 0
COMPASS_CUS_PIT = -120
COMPASS_CUS_ROLL,0
COMPASS_CUS_YAW,-180.
I was able to change the COMPASS_AUTO_ROT to 0 and COMPASS_ORIENT to 101. But I was not able to find where to add the compass_cus_pit/roll/yaw values. Do the custom values need to be manually added to the PARAM file and imported into MP?
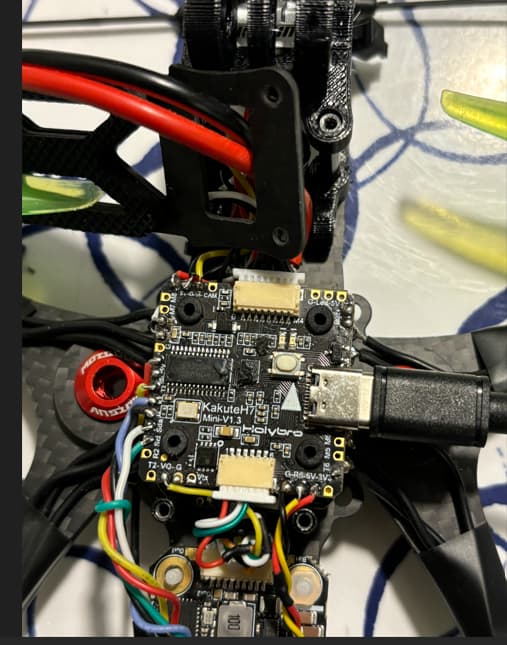
I am using Quad X config, with FRAME_TYPE=1, Arducopter 4.5.2. My frame is a Rekon 5 clone, so the GPS/Compass mount is a bit different that required me to rotate the GPS backwards
(Non-standard compass orientation). And apologies if it sounds quite too neophyte like.
Here are some pictures.
Compass
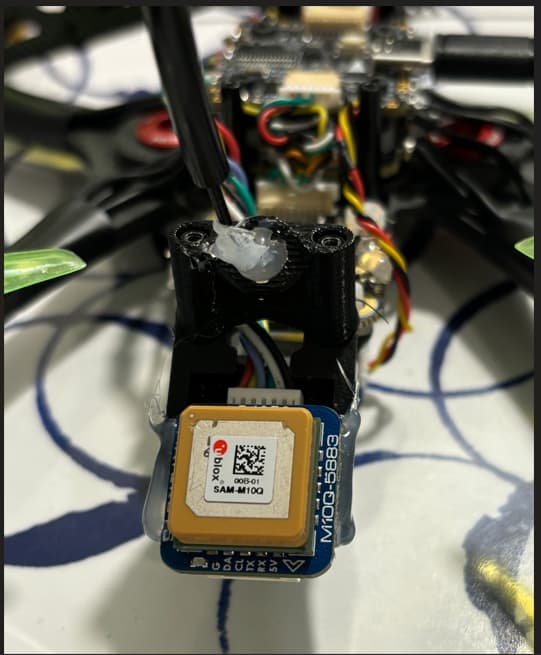
FC