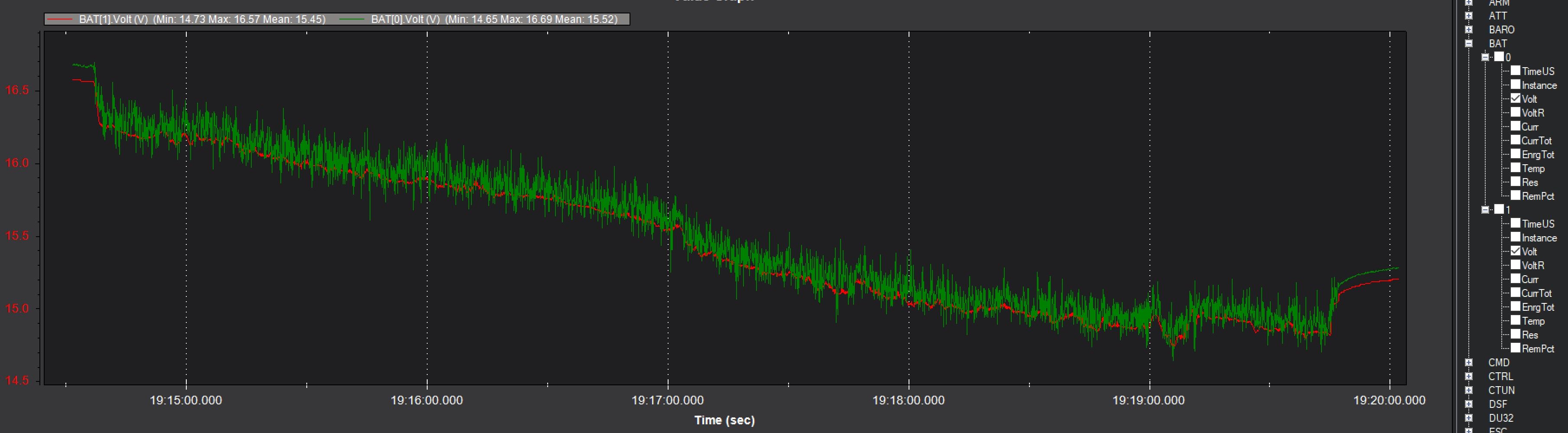
I get indeed individual ESC voltage measurement. But hwo to get the global average of these four individual voltages ? (batt voltage 2 is always zero in mission planner)
Is BATT2_MONITOR set for ESC (9) ?
Example. In my case BATT 1 (0 in the log) is from ESC Telemetry and BATT 2 (1 in the log) is from the Flight Controller. You would configure them the opposite.
I’m pretty sure the default setup simply reads the voltage from VBAT without needing to interpret the ESC telemetry stream - I get a correct voltage measurement without setting my sensor to ESC telemetry.
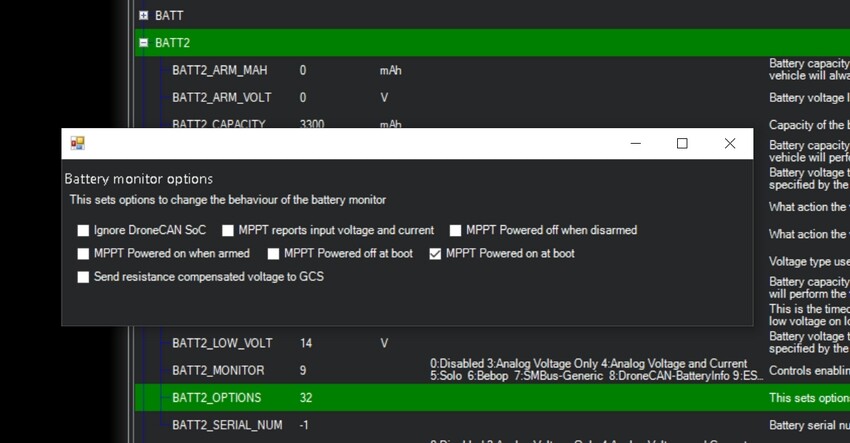
Ok ESC telemetry provides a global battery voltage monitoring but to avoid it displaying zero, the batt2_options parameter needs to be set (in addition to selecting the ESC type for batt monitor2):
I have added a final video and updated the tuned settings to reflect where I got to. I’m very pleased with this build - it works really well.
These video series are solid gold!
I just finished (well, finished for now) tuning a 3.5” Cinewhoop-styled Shen Terraplane with the latest revision of the Kakute H7 Mini. After a few shaky starts, I can report that I’m REALLY happy with it.
It always behaved poorly with a rev1 MatekH743Mini, which I think can be attributed to board design, since they quickly revised that board. The ICM20602 on that board always seemed highly susceptible to vibration, no matter what I did. The single BMI270 reports FAR less vibration on the exact same frame/motors (but maybe slightly better damping, so I shouldn’t be too quick to judge IMUs, though my last few tuning attempts on the Matek board proved completely futile and near catastrophic!).
Of note for the KakuteH7Mini-Nand firmware, the only Copter target has BDSHOT enabled on the first four outputs, though it isn’t obvious by the firmware name alone.
I even loaded the 4.4-dev firmware today just to see how the new yaw-D autotune might play out. I know it’s designed more for larger frames, and it certainly didn’t do anything amazing for the tune (yaw D settled at 0.001, probably because that’s the min allowable ![]() ), but it was cool to watch it in action, nonetheless.
), but it was cool to watch it in action, nonetheless.
I also enabled wind estimation/baro compensation, which I can report is a bit tedious but very effective! Maybe I’ll look into a helper script, as @priseborough and Tridge discussed in the video presentation a year or two ago…although that wouldn’t help the H7 Mini, since it has no file system for scripting.
2 Likes
Hi Andy.
Please help me tuning ACRO mode for 5 inch quad (apex5 frame, about 700g weight)
I’m make auto tuning, but this very bad for acro - wobbles a lot after roll or pitch or yaw.
I’m incresing D for roll and pitch - more better but in high throttle - also starts to shake - because big D.
I’m include logs.
10 01.01.1970 3-00-01.bin - Google Drive,
11 01.01.1970 3-00-01.bin - Google Drive
Did you see the video series I just did on this? https://www.youtube.com/playlist?list=PL_O9QDs-WAVyPrHMBa5SC_AF-u5Bx2Gy_
This copter looks very powerful, can you share some details of the motor setup?
Xing2207 1855kv. Mambah743 esc 50a. 6s 1300ma.
Im try watch your videos. But im think im need such TPA as in betaflight ? ![]()
Wobble at high throttle is usually an incorrect value for MOT_THST_EXPO
You should not need to increase D from autotuned values. Which log shows the wobbles?
So I suspect what has happened is that your copter is so powerful that MOT_THST_HOVER has hit the minimum of 0.125 - which means I think the tuned PIDs will be wrong. Really we should relax that constraint.
Im install 4.4 and make auto tune again. And after acro flying im send new logs.
But what im need if my quad so powerful? Any recommendations for tuning? Hover trust - stay in learning and save mode. Thst expo - this is from tuning guide - mission planner make calculation from 5inch.
For acro - im have overshot after roll or flip or yaw maneuver. Increase d helps. But high throttle - bad
Please turn on PID logging and full rate attitude logging and send the autotune log.
Your copter is not actually as powerful as mine so should be fine
I’m think after last auto tune with 4.4 fw i’m have more better results in ACRO.
How increasing speed of stick reaction?
There are many things you can change to tailor the pilot feel
ACRO_RP_EXPO
ACRO_Y_EXPO
ACRO_RP_RATE_TC
ACRO_Y_RATE_TC
RCx_DZ
ATC_INPUT_TC
etc
@andyp1per - Did you use Mavlink protocol to configure the compass for this build? If so, are you using CRFS bidirectional telemetry to get Mavlink data? If so, then may I ask how you got Mavlink protocol communication working?
I could only make Telemetry work by connecting the CRSF receiver’s 2 additional channels to an additional UART, configuring that UART to communicate via MAVLINK protocol. I am thinking of doing the same with Sixty9 by connecting Out 4 TX and Out 3 from the RX to UART4 on FC, thoughts?
I used this video as my guide. https://www.youtube.com/watch?v=jxJshM8C2M8.
Here is my setup for Mavlink communication:
Ardupilot 4.5.1
Holybro Kaute H7 mini V 1.3
RadioMaster TX 16S - EdgeTX V 2.8
TBS CRSF Nano RX – Firmware version - V 6.19, HW - V 1.33, Bootloader V 2,06
TBS CRSF Micro TX V2
HGLRC M100 GPS
470 uF Capacitor on XT60 power pad
Connections
RX WiFi - connected to local WiFi SSID
- RX Ch1 → FC TX6
- RX Ch 2 → FC RX6
- RX Ch 3 → FC TX 4
- RX Ch 4 → FC RX 4
In RadioMaster - Output map updated have output 3 and Output configured to Mavl.RX and Mavl. TX respectively
MP configuration:
- Serial6_Protocol = 23 (As RX connected to UART 6)
- RSSI_Type = 3
For CRSF Bidirectional Telemetry
Serial4_protocol = 2 (for CRSF telemetry via Mavlink)
Serial4_baud=115
For Yaapu: (It is working beautifully!!)
RC_Option = 288 (for Yaapu)
No I am not using Mavlink over CRSF and I think you will find it will saturate the link if you use it with yaapu. I don’t understand the compass question - just plug it in over USB and configure it, no?
Great to her that compass calibration done with USB cable is sufficient.
I had read that compass calibration needs to be done away from all sources of EMF and metallic objects. So, I have always used Telemetry radios for compass calibration, and I always do fresh calibration if flying at a new place. Additionally, I would like to send autonomous mission commands from my laptop and delve into doing the same from QGroundcotrol from an android phone, for which I thought I needed Mavlink communication. This build for me is a development platform as well as long range flying.
Oh I see. That’s easy enough - just start it with USB attached and then detach the USB. You are right that doing the calibration outside away from metal and with a good GPS lock is a good thing to do. If you have a buzzer then it will beep while the calibration is going - or LEDs will flash red/blue. I think you might even be able to use dshot sounds to know when it is done.
Thanks Andy.
Hope to get the soldering done today. Hoping your param files for this build will make an easy job for tuning the drone. Stay tuned ![]()
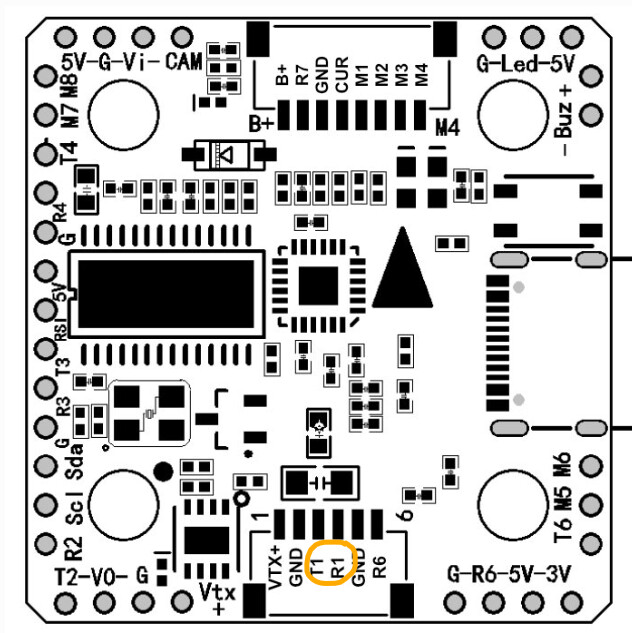
As promised, I soldered all the components. Vtx+ pad is not providing the 9V to the RX. The RX is not getting powered up. I checked the voltage for the CAM and GPS which was I found to be close to 5V. When I checked the voltage for RX and it seems to be fluctuating on the Kakute Mini 1.3 (I have 2 and both behave the same way). Here is the video. (https://youtube.com/shorts/y4pr97tN7EQ?feature=share). When I connected the RX to the battery pad directly, the RX gets powered up. I would like to take advantage of CRSF bidirectional telemetry by connecting the RX to UART 1. Any ideas why the Vtx+ on 2 Kakute mini is not able to provide the 9V to the RX. Should I just connect the RX (CRSF Sixty9) directly to the battery pads on the ESC (Tekko 32 F4 50A BLHELI_32 4in1) and the TX and RX to the UART1 as below:
Apologies for these neophyte questions. I am new old hobbyist, but I am motivated to make it work ![]()