ok. But in your case, do get a correct startup “music” in this way ? In my case, a couple of seconds after plugging in the battery, I hear some strange succession of beeps (monotone) from the buzzer. Then after a few more seconds I hear the “normal” startup sound from the ESCs (although the NTF_BUZZ_TYPES is not configured for DHOT/ESC , but configured for build-in buzzer).
Yes I get the correct startup music
olk.Are you sure you connected the yellow wire on M8 ? because you mention previously that you connected 5V on M8
The test I did yesterday I just used a 2-pin buzzer. On my Rekon5 I have the yellow lead connected to M5
Do you think it’s viable to swap out the FC with Pixhawk 4 Mini in this build? Pros and cons?
Pixhawk 4 mini is way too big - no way it would fit. This is a pretty small frame.
I need to do an update video on the tuning and also post some photos.
Did you connect a voltage monitor to it? You should.
Did you configure it properly? You must.
Voltage monitor is built in the Kakute H7 mini. It is perfectly configured and measured voltage is accurate.
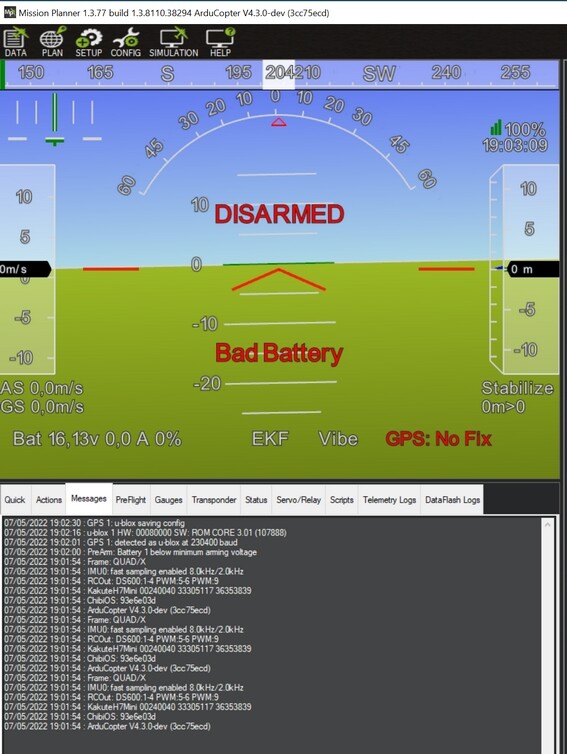
The message comes from Ardupcopter’s firmware : what does it mean ? and I wonder on what basis it could interpret it is a “bad battery” (since voltage corresponds to a 4S) ?
Arducopter issue that is !
It is either not configured properly, or the battery’s internal resistance is too high.
Arducopter has no way (and no hardware to do that on the FC) to measure the internal resistance of a battery without the balance leads being connected to the FC somehow.
I doubt this is the explanation.
It measures voltage and current and estimates internal resistance. It will not measure it, and will not estimate a per cell internal resistance, i never said that it did.
If the voltage drop is too big it will complain, and if the failsafes are not correctly configured it will complain as well.
How good is the battery? Did you do the initial tuning instructions?
I found the issue. It is indeed an issue of arducopter for this particular Kakute H7 mini board : current is measures by the ESC and transmitted to the FC via ESC telemetry. However for some reason, Arducopter does not extract the current measurement data from the ESC telemetry (which is sent on serial 7). There is also a “Current pin” on the FC which is one of the pins from ESC input connector. It does not read that current input either.
So I guess the ardcopter firmware and/or hwdef file for this board should be modified to be able to read from either the esc telemetry and/or from the current input pin on the fc.
Not all ESC’s provide current via telemetry. Very few 4in1’s do if you are using one of those. There is typically no problem measuring current via the current out pin of the ESC to the Current pin of the FC. Which ESC is it?
The only way you will get current via telemetry on a 4in1 ESC is if it looks something like this:
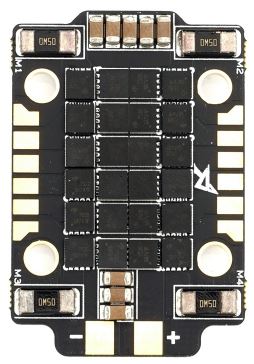
Note the 4 shunt resistors, one for each ESC section. These do not have an analog current pin, telemetry is the only source.
The FC and 4 in 1 ESC I’m using are the Kakute H7 mini and Tekko32 F4 4in1 mini 45A ESC:
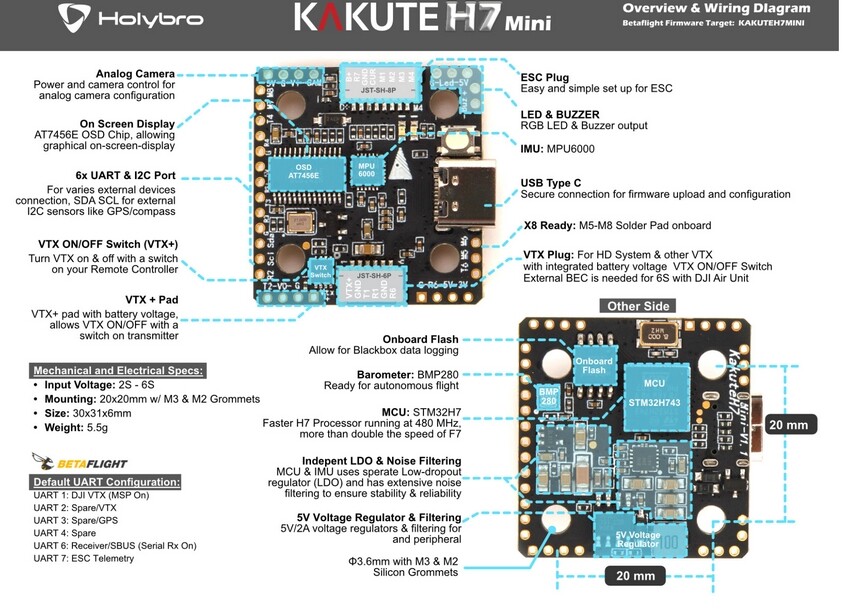

This ESC measures current and sends it to the yellow current pin on the FC. That PIN is probably not defined in the hwdef.dat for this board ?
No current via telemetry with that 4in1.
Sure it is. Noted in the Readme and in the hwdef.dat
K H7 Mini
The current monitor needs to be configured as esc telemetry current monitor.
that did solve the bad battery message, thanks.
So the UART1 (rx) from the ESC telemetry is not supported and only the voltage and current pins are supported.
The PIN definition is not clear at all in the documentation , as the only line found in the hwdef.dat file with keyword “current” says : PC1 BATT_CURRENT_SENS ADC1 SCALE(1)
hard to deduce this corresponds to PIN 11?
Also the wiki says that pin 11 is for “esternal” sensors, while in this case this is an internal sensor of the H7 mini stack. I never thought the 4-in-1 ESC of the stack (sold as one product) is an “external sensor”.
Maybe we should say in the wiki that the Kakute 4-in-1 ESC from the H7 stack is to be configured on pîn 11 and that ESC telemetry does not work (that is said nowhere).
Please do a pull request on ardupilot wiki to improve the documentation
Pull request is done.thanks