Firstly Merry Christmas & Happy New Year to you all
Today I got my first Ardupilot 2.8 with the Elegoo Uno Starter Kit to help me learn the basics.
Upon installing and calibrating the Ardupilot 2.8 everything’s works perfectly. I would like to know the following info & im happy to pay whoever can assist me via PayPal and maybe we can connect via Skype for a online tutorial.
My first question is:
As you can see in this video upload provided by Randy Mackay he uses the Ardupilot to log Sonar Data and then processes the Log Data or Flash Data to then be viewed on a map visually: https://youtu.be/msX9GsBZDtY
I wanted to know rather than having the datalog/dataflash map the sonar to then be processed and viewed on google earth, is it possible to map the same data in the same way but for current and voltage sensor instead?
Randy on YouTube then replied:
It is possible because all the data is in the logs but might require some post production of the log. It’s best if we discuss this in the Ardupilot Rover Support forums.
So that’s my first query regarding logging voltage or current data and then viewing that in a google earth format.
Second Question is:
I have noticed that the PIxhawk comes with an SD card which is for storing log data. The Ardupilot does not come with a SD Card so I assume there’s something inside which stores the data. If that’s the case how much data can the Ardupilot store & am I able to upgrade the storage capabilities if the storage size isn’t large enough? Let’s say I wanted to record a rovers data for 3-4 hours, does the Ardupilot have enough internal storage to record Voltage & Current readings? I will not need data for anything else other than for saving Voltage & Current readings so maybe that might be enough space? Or ultimately will I need to send back the Ardupilot & get my Wife to buy me a Pixhawk instead?
Thanks for all your time in reading my questions and i look forward to your replies.
1 there are plenty of dataflash log and telemetry data available, how you choose to present them, is mostly up to you and your tools.
2 I guess you mean the old ArduPilot hardware, do not buy it , it’s old, deprecated , too little storage , too little program memory, too little RAM and too little CPU power to run impressive things like EKF.
Some of those had a little flash space for logs, most had microSD cards, in any case, none could handle very high lograte.
Get Pixhawk or Pixhawk2 (with Cube 2.1)
You’ll get an microSD slot, and can store lots of logs also at high logging rates.
Thanks for your reply and advice Andre. For now I have got the Ardupilot 2.8 as an Xmas present today. It’s this one:
If I can at least get it setup and can see that what I want works then I will definitely upgrade to the newest Pixhawk with the Here+ with The Cube GPS.
But right now I would like to figure out how I’m going to get what I already own working, record voltage/current data and view this data on google maps if possible.
What I need to do now is figure out how to record the voltage/current data without a telemetry connection & have the Ardupilot store this data and then view it later in a visual way on google maps or any map rather than just looking at a bunch of numbers.
Can you please provide me with a guide on how to do this?
Once they dropped SD support, you should have some internal logging, it’s impossible to say how small/or big flash they may have used.
You can download internal logs using a GCS like AP2. The storage space on board is very limited, so be sure to use LOG_BITMASK to log only the data you need.
read http://ardupilot.org/rover/docs/parameters.html , or search for “LOG” in that page, and you should find all the options available to you.
If you have another computer/system onboard, you could easily log the serial telemetry for much more telemetry, not restricted to a few MB of the ArduPilot 2.x itself.
I’m going to go for the telemetry kit so that way for the meantime I can store the data via telemetry directly into mission planner on my laptop & if all works out I will then upgrade to Pixhawk with The Cube.
Regarding the LOG_BITMASK to log only the data you need, how do I go about setting that up?
There are two different logs. The telemetry just records well telemetry which are Mavlink messages. The dataflash logs record the kind of detail information you need. You will not get that via telemetry but you must download them from the flight controller after the flight.
I agree with @Andre-K that the APM2.x flight controller should really be replaced with a more capable modern board like one of these. I can’t really provide any support for the old APM boards.
At the risk of being a bit pedantic but just to clarify terminology:
Mike your advice is definitely making me understand. I’ve looked at the parameter list and it’s HUGE! how can I go about making the onboard logger just save the snail trail of where it’s been alongside the voltage/current readings?
Please bare in mind I’ve just got the APM yesterday and I’m literally bamboozled with how I’m meant to set this all up. I really need some help to get this working and I’m willing to pay anyone who can help me via PayPal. If your someone who can offer me this service let’s get started & I can send you the funds any time your happy to start:+1:
Thank you for your reply Randy. I know you said that the version I have is not supported but if you could make an exception I would be happy to pay you via PayPal to sort this all out for me. I’ve watched your YouTube videos & I know your more than capable of getting this up and running for me. If you’d be happy to make an exception and perhaps we have a Skype call and a walkthrough of what I want we can come to an arrangement & I can send you the funds for your help. Many thanks
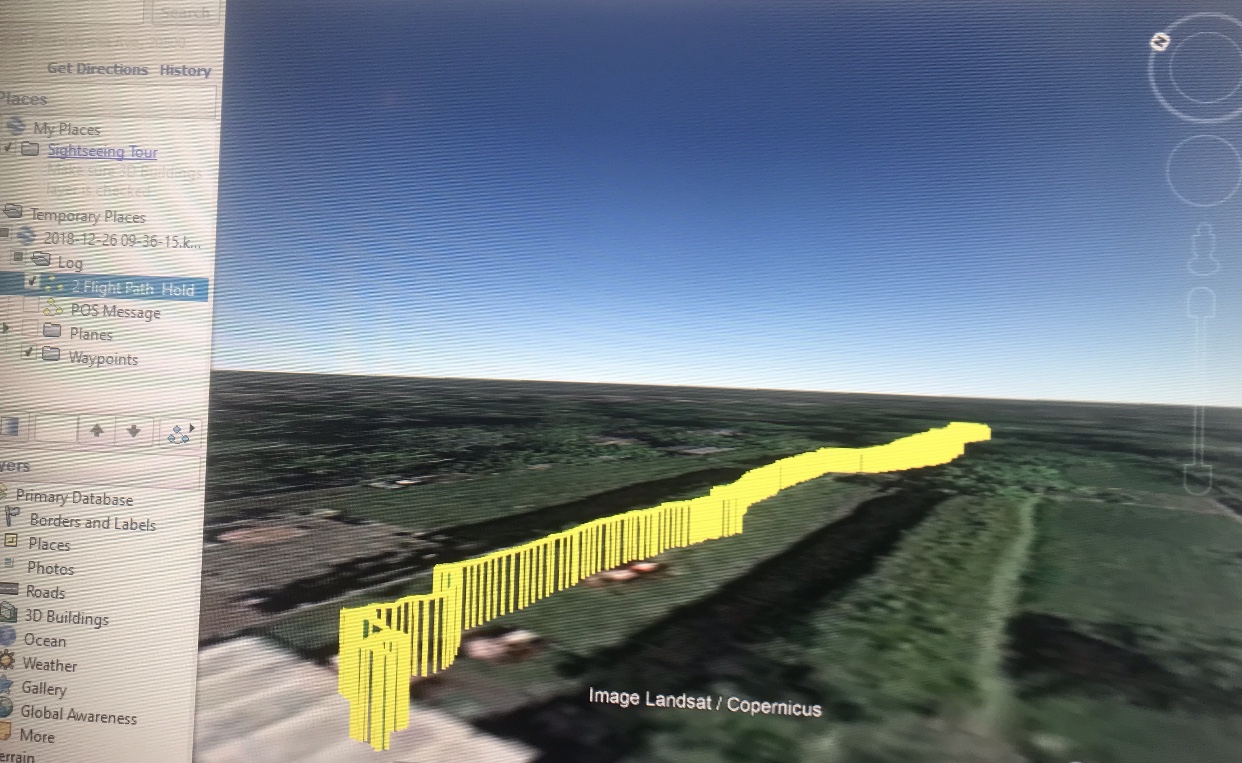
Mike I have just successfully recorded me walking down my garden with the APM 2.8. Once in Google Earth the KMZ file opened & I can view the Flight Path. Just wondering now how to access the voltage readings from my walk and view them in the same way.
Under Config/Tuning Tab - Advanced Parameters - (LOG_BITMASK) I have selected, GPS, CURRENT, COMPASS, STEERING.
The rest are not ticked.
Not sure what to do next. Damn this is harder than I was expecting :[
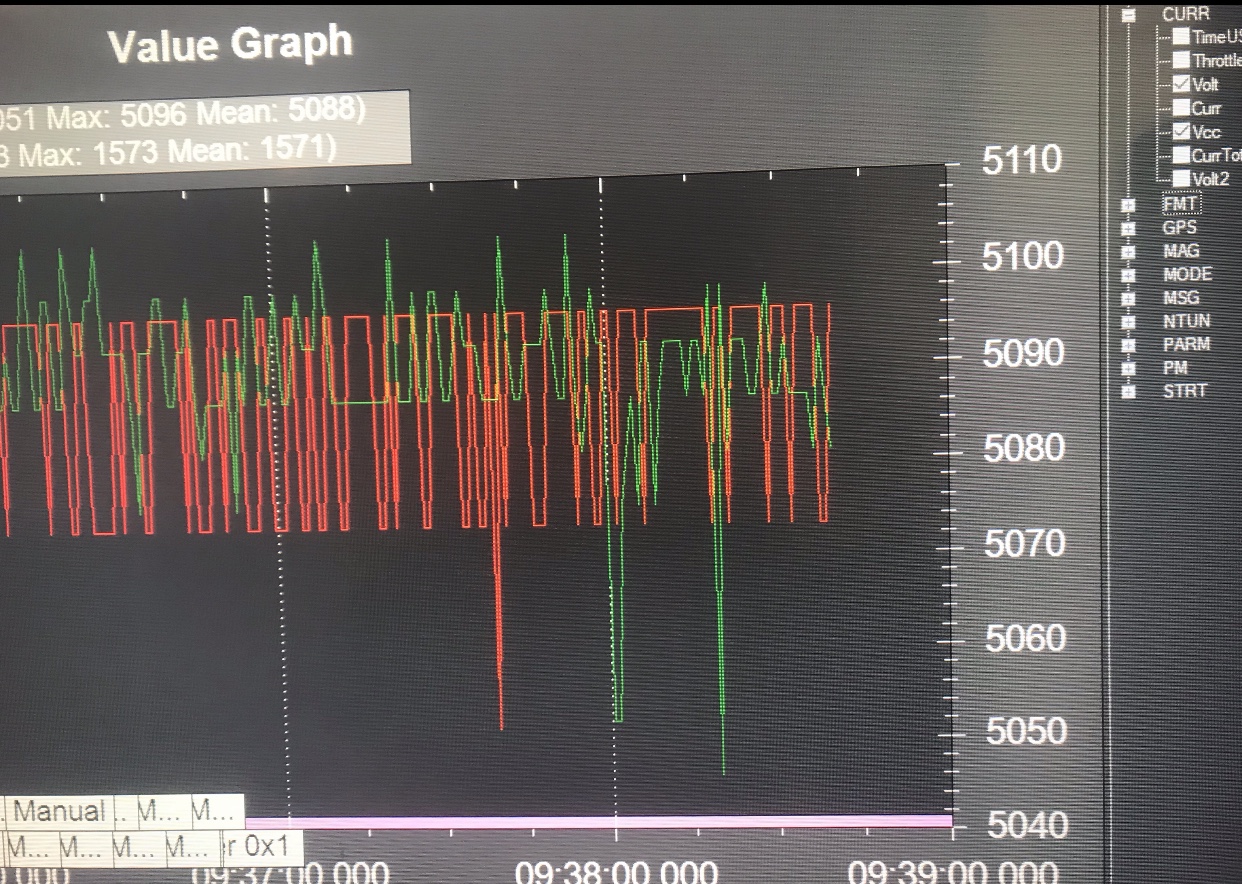
I’ve also managed to locate the Voltage & Current Readings from the flight data which was saved on the APM 2.8 and then viewed in Mission Planner. Now I need to figure out how to view this data in google earth the same way I viewed the flight path KMZ file. Please excuse my noob explanations as I’ve only had this for 1 day and ZERO previous experience. Many thanks to all of you who have taken time out to answer my questions and for your patience
I don’t know of any free software to do it directly. A short script in Matlab, octave, python, procesing or an other language. You could make such a plot the re import the image in to google earth. I think you would have to manually scale it and line it up however.
You are doing great. So you have downloaded the data from the “flight” and then used the tools in Mission Planner to plot the Voltage & Current readings over the length of the flight. But to synchronize those readings to the KMZ you will have to write a program to read the data downloaded yourself, rather than use the provided tools in Mission Planner. You will need to parse the data for the voltage & current readings and extract the data along with the timestamp of the time of the reading, then compare that to the KMZ data and associate and sync those timestamps with your voltage and current readings. Takes a little programming.
You could also do it by hand “I think” by playing back the telemetry data in mission planner and stopping the play back and note the voltage and current readings on your graph above at intervals during the flight. It depends on how precise and how often you need to do this. Mission Planner, under the HUD with the log save tabs, can load a telemetry log and play it back. You can see on the map the path and I assume the time. But I don’t remember exactly and I don’t have a windows machine with me at the moment.
Unfortunately I don’t have the time. But at the rate you are picking up Ardupilot you are not going to have any trouble. There are a lot of parameters but you don’t need to learn them all at once. Just the ones you need at the moment.
The telemetry logs record every aspect of the communications between the ground station and the aircraft, or in this case groundcraft during a flight. Where it is, how fast it is travelling at etc. Playing back the telemetry logs, saved automatically on your computer, recreates the flight on the map display in Mission Planner. That with it’s timescale should allow you to pause the playback and note where the rover is on it’s path and then check the dataflash log for the current and voltage measurements at that moment. It would not be good enough technique for a engineering analysis but if you just want to get an idea how the voltage and current changes during flight this might do the job.
In basic terms all I want is to view additional data via google earth using the .KMZ file. The only data that I can see is the flight path.
I’ve ticked current in the BITMASK options and once the .KMZ file is created via the data logs it still only shows a flight path.
Need to know the exact steps to getting this data added within the .KMZ file to then be viewed via google earth.
Right now this seems impossible
Just looked the the Pix4D webiste. How would I go about getting this data on there? Also if what I’m after requires
Custom coding are you able to do this & if so what would your fee’s be for your services? Thank you for replying
Just downloaded Pix4D and it’s used more for adding loads of images to then create a 3D environment with some added features like thermal imaging etc. I don’t think this is what is required for what I’m after. Still a cool bit of software if people are taking loads of pictures via a drone and adding them into Pix4D Mapper
I have never used Pix4d myself, they must have a some tech support or something.
If you have assess to Matlab I could make a quick code for you to try out for nothing, I know matlab and mission planner already exports logs to a matlab format so it shouldn’t take long, would have to be in the new year tho.
I think it wouldn’t be too tricky to convert this code into octave, its basically free matlab.
That sounds great Pete, thank you very much. I don’t know what Matlab is. Please give me the details of what I need to do on my end and we can sort it out. I’m happy to send you some money even tho you said you’d be happy to do it for free. Can you do it now or do I need to wait for new year? Now if possible
 Firstly Merry Christmas & Happy New Year to you all
Firstly Merry Christmas & Happy New Year to you all