I also think that it probably tends to result in an external vario. I will discuss that again. Thank you for your hints!
Thanks Alex.
I will give this some thought. I have an ESP32 here already.
Thanks for your time,
Dave.
1 Like
Hi Alex,
do you know why VSpd is not transferred with protocol 4?
I released version 1.8.0 with minor changes from RC2.
code is on github
full changelog:
- removed dependency from blue theme
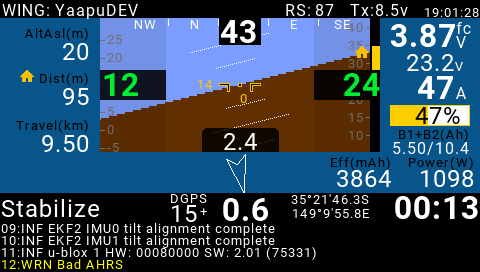
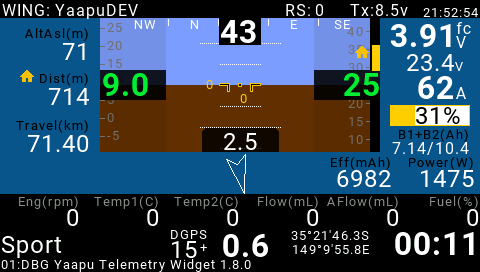
- added new hud layout, speed on left, alt on right VSI on bottom
- new message history screen with telemetry info
- added support for up to 6 user selectable frsky sensors
- added haptic feedback support
- added total flown distance (calculated from speed)
- added PX4 flight modes support
- added support for mavlinkToPassthru firmware
- added vocal playback of selected mavlink messages
- added support fot series and independent battery configurations with individual cell count override
- added support for battery voltage > 51.1V
- added new message alert silencing options
- added menu option to define a channel to toggle between main screen and message history
- added support for boat frametype
- fix for quick flight mode switch
- fix for rover modes vocal playback
Alex
1 Like
Hi Reinhard,
I have no idea why it was not implemented, I checked the code and the library is using the vario IDs to only send altitude, you might raise an issue and ask to add it?
I did a simulation to check vspd latency, SITL is running my patched scheduler and I did not notice any “big” pauses in vspeed reporting.
I realized I told you to use “alt” (altitude) as vario source but I was terribly wrong, please excuse me, the correct sensor is vspd indeed!
Hi Alex,
thanks for the info.
Hi Antonio,
release 1.8.0 has a black background for user sensors and should be much easier to read under direct sunlight.
cheers,
Alex
Thanks Alex, I am very excited to try the new release and thanks for satisfying my request.
Sorry for my english
Grazie.
Best regards
Antonio
You’re welcome and “il tuo inglese va benone” 
Alex
1 Like
Is there a straightforward way to add custom flight modes?
Hi, yes it’s pretty simple, what follows is for the Horus but for a Taranis the procedure is the same except for the folder paths.
If you added one or more flight modes to ardupilot and would like to show them on screen and eventually have sound notifications you need to add them to the relevant vehicle flight mode lua files
- /SCRIPTS/YAAPU/LIB/plane.lua
- /SCRIPTS/YAAPU/LIB/copter.lua
- /SCRIPTS/YAAPU/LIB/rover.lua
each of this files has an array of modes, in case of copter
–]]
local flightModes = {}– copter flight modes
flightModes[0]=“”
flightModes[1]=“Stabilize”
flightModes[2]=“Acro”
flightModes[3]=“AltHold”
flightModes[4]=“Auto”
flightModes[5]=“Guided”
flightModes[6]=“Loiter”
flightModes[7]=“RTL”
flightModes[8]=“Circle”
flightModes[9]=“”
flightModes[10]=“Land”
flightModes[11]=“”
flightModes[12]=“Drift”
flightModes[13]=“”
flightModes[14]=“Sport”
flightModes[15]=“Flip”
flightModes[16]=“AutoTune”
flightModes[17]=“PosHold”
flightModes[18]=“Brake”
flightModes[19]=“Throw”
flightModes[20]=“AvoidADSB”
flightModes[21]=“GuidedNOGPS”
flightModes[22]=“SmartRTL”
flightModes[23]=“FlowHold”
flightModes[24]=“Follow”
flightModes[25]=“ZigZag”
flightModes[26]=“Initializing”
flightModes[27]=“MyCustomMode”
add the extra items with a description and recompile in companion.
To recompile install the yaapu widget in companion by using the sources from here and overwrite the flight mode file in /SCRIPTS/YAAPU/LIB folder with your customized version
For audio notifications create a wav file with a name matching the flightmode (all lowercase)
To install your modified version simply copy the updated “/SCRIPTS/YAAPU/LIB/[vehicle].luac” file to your radio SD card respective folder.
Alex
1 Like
hi Alex, will your script also work with RTK like GPS? (ArduSimple simpleRTK) Will provide same datas as a normal GPS? thanks. Chris
Hi Chris,
haven’t tested it first hand but should work just fine and even report the fix as RTK. Number of reported sats would still be limited to 15 max but besides that rtk is just a gps from the telemetry library point of view.
will keep you informed when I will get one. Anyway thanks for the quality of your solution and for all the time you spend answering always ASAP on this blog!
1 Like
Alex … and good choice in Lua. Now is there a way to integrate further improvement by using 4G via embedded SIM as in the Parrot Disco. Time for collaborative effort, in a surveillance project using a Gryphon 8 as retrieval of any downed Disco 's, these or Gryphion M8 's (looking at) to be kept up 24/7 in a manual fleet rotation.
Sounds like a quite complex setup, how do you envision the further integration you mention?
This interface to the Parrot Disco radio is ported to the Gryphon A3 , or flight path overlaid to the Gryphon, which may deploy to sensed area without drone failure.
That is the easy part, Parrot interface is working, future upgrade to longer flight remote drones. Base is security manned, so a hand launch each 40 mins is bearable.
Its the collaborative effort I am after. No matter where u are, today straightforward.
More clarity , Existing interface to Parrot Disco Rx <> 4G port may either be ported to Gryphon A2 / A3 radio, OR flight telemetry used from Existing Parrot 4G link , to deploy Gryphon to sensed area (sometime necessary even without drone failure)
Simplicity of 4G interface for telemetry/ Control & Parrot standard video to be transmitted 20+Km. This simply extends the standard WI-FI tether thru 4G, giving the Disco GPS thru 4G link, as a bonus. U don’t need to port this, however u may want2
4G interfaces as a hotspot device on TX (android or iPhone // a 2nd broadband modem plugs into CHUCK on Disco. u pay for 2 separate broadband data accounts.
With telemetry control autolanding … like this … er … this …https://diydrones.com/profiles/blogs/ardupilot-how-to-land-a-fixed-wing-drone-when-tx-or-rx-fails
Other than that , a port to Taranis X9 (not a huge challenge given standards) is welcome, to allow higher def video of the full gimbal Gryphon investigator.
Hi Rus,
for this kind of projects you might be better off asking for commercial support, check the ardupilot wiki for more references.
Alex
Alex , thanks for the response, however I have not gotten far with commercial devs.
Up front Cost gets out of hand … ideal entry into project JV with all bits supplied from my side.
and modest time $ up front to merge the Auto landing by T ( per link )
I prefer things done by peop with hands on to a central theme… even u are not commercial.
Telemetry is not too high hurdle, as u provide patch files for various Tx …
Any future update for Futaba T14SG ?
that link for landing via T is compelling , any interest with integrating this feature ?
yor right on the 4G aspect…
If Disco is not replaced (on the cards) this can be ported by the 4G guys.
Fine work on the T , would not a natural next step include Auto Landing (hard to believe video is repeatable )
Bravo
1 Like