That works - thank you!
2 Likes
Hi Alex, is this screen now in the yaapu7.lua script as well? i just downloaded current master but not sure if it is in there - it shows me version 1.7.2 in the script data?
Hi Paul,
not yet, what radio do you have?
The X9D version is ready for testing the QX7 not yet.
Hi, thx, it makes sense, as I am now using xlite smaller radio, X9d is on the shelf. 
Thx, I can wait.
1 Like
Hi,
this is a short video of the Horus Widget displaying gas suite sensors information on the right panel,
big thanks go to @yak-54 for sharing the clip
1 Like
This runs great. Superior work, I love it.
2 Likes
Hi Paul,
screen on XLite and QX7 is quite small,I’m looking for advices on what to put on the alternate screen(s):
some ideas:
- FPV optimized view
- custom sensors screen
-??
and since GPS coords in DMS format are available as native on OpenTX telemetry screen is it still a priority to show them while in the yaapu script?
hi, fpv optimized is probably the best option, i would agree with that.
Hi Alex-I noticed while using your script for Ardurover the Loiter flight mode comes up blank on the screen (X9D) and Simple mode is not recognized. Simple mode is new for Rover so maybe that’s expected. Not a big deal, maybe you can look into it for the next release?
Many of us use this telemetry for mapping. If you could give us photo counts/statistics, that would be great. If the camera is triggering or paused. Also the altitude above terrain.
In addition, I think per-cell smart battery voltage is on its way, so preparing a little bar chart for up to 6s would be great.
Finally, I would put a mission status graphic indicating the current waypoint, distance to next, time to next, total time in air, and estimated time to complete the mission. Wind speed would also help us monitor safety of flight.
Less important, but maybe still useful to folks would be a telemetry ESC page with info from each motor.
I’m not sure how many of these things are available from ardupilot, but we appreciate everything!
Hi Dave,
you’re right rover modes are a bit outdated.
thanks for pointing this out
Hi Nathan,
the intent of my question was more what would you put on a second screen from the pool of data that we already have from ardupilot (which does not include anything from your wish list)
To overcome current limits @Eric_Stockenstrom and I extended the protocol to provide additional info when using his mavlinkToPassthru “Plus” firmware on a Teensy.
The idea was to test new features and eventually port them to the “official” telemetry library.
Our testing led to a PR for waypoint support that is “on hold” waiting for some code refactoring to happen.
With a teensy either on-board or on the ground right now you would have access to:
- current waypoint number and distance
- airspeed separate from groundspeed
- throttle
The teensy has full access to mavlink and can pretty much extract any kind of data the limit being the memory constraints of the radio lua run time that decodes and displays it.
From your suggestions I gather
- wind speed estimate
- time to next waypoint (calculated)
- total mission time, ETA (is a hard one because requires access to all mission commands and needs to take into account command types such as hover there for 30s)
- camera info
- ESC telemetry (bandwidth is constrained you would get a very poor refresh for this info)
- smart battery details
- altitude above terrain
thanks for your feedback!
Alex
Hey Alex.
Thanks for your fantastic tool. 
I had the opportunity to maiden somebody’s quad today using the guy’s radio, a Horus X10. With AC 3.6.6. And do an autotune. My last experience with autotune was back in november on 3.6.2 or 3 -rc-something on my Taranis.
To my surprise, the autotune was extremely verbose on the adjustments it was doing - a lot of pings and system messages - while almost all the HUD was frozen. The artificial horizon was jerking now-and-then, but all the important stuff, like volts, amps, mAh and percentages, alt and numsats were frozen solid up until a couple of seconds after autotune finished.
Is it 3.6.6’s fault ? Horuses ? Did I neglect to do some settings ? 
Oh, and yay! for teensy. Since the advent of passthrough and your HUD (thanks are at the start of the post) there’s a bunch of teensies that used to roam the skies doing mavlink-to-sport that are now collecting dust in a corner.
Cheers,
Para.
1 Like
Hi,
what you experienced is one of the design choices that craft&theory made a while back, mavlink messages have a higher priority than anything else besides pitch and roll, this can stall communication while the library tries to empty the message queue.
I did an autotune on copter 3.6.6 yesterday myself and had the same issue, autotune became VERY verbose, no telemetry info but messages and hud until the end of the autotune process.
There’s about nothing I can do on the receiving side, changes have to be done on the sending part.
I killed the teensies and Eric brought them back to life ![]()
1 Like
Hi Yaapu,your work is amazing any chance of doing it for crossfire,ive asked before,many thank’s in advance,Marty.
Hi Marty,
can crossfire deliver full mavlink to the back of a taranis or Horus?
1 Like
I believe so but am not 100% surethey have just updated it a couple od days ago,and thank you for replying
Hi Marty,
my understanding is that you can get mavlink on the bluetooth link and native CRSF protocol to the taranis s.port, if this is the case I’m afraid you won’t be able to use my script with your crossfire for I do not support CRSF protocol!
But I do not own a TBS rx/tx combo so I’m unable to do any testing!
cheers,
Alex
1 Like
Hello @yaapu and all,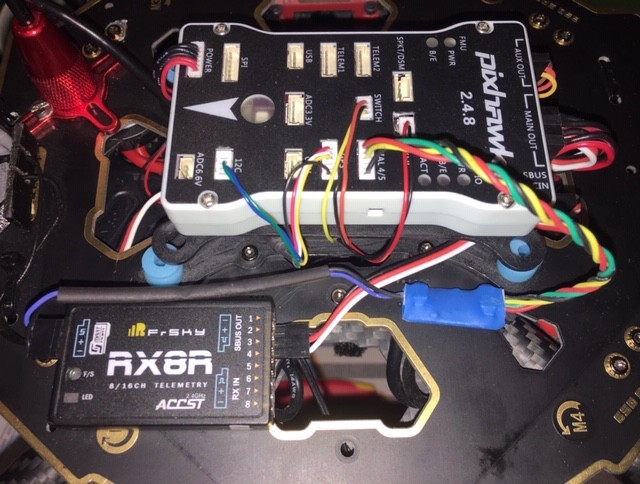

I am having issues to get my telemetry to run.
My configuration:
Quadcopter: Tarot 650
Flight Controller: Pixhawk 2.4.8
Receiver: Taranis RX8R
Transmitter: Taranis Q X7 with Open TX 2.2
Telemetry cable: Aliexpress yaapu telemetry cable connected between SERIAL 4/5 on the PIXHAWK to the Smart Port on the receiver. Note that I set the SERIAL4_PROTOCOL to 10.
When I “discover new sensors”, I get only 3 set of data: RSSI, RxBt and GPS. I would like to get all the availbale datas including battery voltage.
See pictures attached.
Could you help me please?
Hi @efroggy31,
I read the original thread here on discuss, just as @iampete said you need to start the script from your QX7 telemetry screen.
It looks like the cable is working all right and that you also configured your pixhawk the correct way.
Take a look at this post on rcgroups and also to this post
The ardupilot wiki has a section dedicated to the script setup on Taranis radios, read here
if you still have problems come back and ask for more help!
cheers,
Alex