Hello Alex! After some minutes I have battery failsafe alarm but on MP I haven’t this alarm and moreover battery isn’t discharged. What can be the problem?
Hi @anon67614380,
yes the script shows also ground speed, check the docs here for specific layout infos.
Groundspeed vs Airspeed is here
Alex
Hi @Tony2k,
it’s very unusual, the script receives the battery failsafe status from the flight controller, can you check your logs or maybe post them so we can investigate the causes, ideally also the tlog file recorded by missionplanner.
There’s lots of people on discuss that can help you in analyzing your logs if necessary!
cheers,
Alex
I can’t offer any help for Tony2K but would like to ask a question. I have the script working on 2 quads and it is brilliant. Now to the question; I log the data from the flight to my X9D but other than GPS it will not log battery voltage or current as displayed by the script. What parameters do I need to use for the log file please.
Hi Hank,
sensors other than GPS are created by the script so are not OpenTX native, I guest that’s the reason why you don’t find them in the log.
I do have a script version that dumps the received telemetry packets to a file but it’s for debug purposes for it needs quite some memory and can crash the script under some circumstances.
This is an open issue on my side
cheers,
Alex
1 Like
Thank you very much Alex,
I had hoped for a better answer but I can understand what you are talking about. To give an example I have a Tarot quad that was giving very short duration flight time of less than 2 minutes. I installed the Yaapu telemetry, I must acknowledge with your help at the time, and noted that within 8 seconds the battery consumption was down to 50%. Advice from a electronic/electrical person has alerted me to a resistance problem in my wiring, it is now on my to do list. I hope you can see where recorded data would be of great help.
Thanks again
Hi Hank,
I agree with you, logging would help, it’s on my to-do list!
Alex
1 Like
Thanks looking forward to the end product.
@yaapu Alex, I just changed the power system on my hex from 2 batteries, two power sensors, two FLVSS to a Mauch system PDB with a built in sensor hub that aggregates the input from the two power sensors. I had the script working perfectly with previous setup and now the battery 2 remaining capacity plummets to zero within a few minutes. I know you had a wiki on dual battery system setup but I have searched and can’t find any information.
Thanks, Randy
Hi Randy,
the wiki is here.
The script tracks individual FLVSS voltages straight from the frsky bus but relies on ardupilot for current and voltage as seen by the FC.
What do your logs show?
How many batteries does the system “see”?
Thanks for the prompt reply, I appreciate your help. I had read through the wiki but thought I remembered a separate post just for dual batteries. I believe I finally figured out the issue, the Mauch PDB aggregates the two batteries and only sends one sense signal to the FC so I set up the FC as if there were one battery and set the script to get voltage info from the FLVSS sensors. Looks like it’s accurate and stable. Thanks again, really a fine script.
Randy Bachtell
Hi Randy,
support for this particular use case was requested a while ago by @pauljatherton so credit goes to him 
cheers,
Alex.
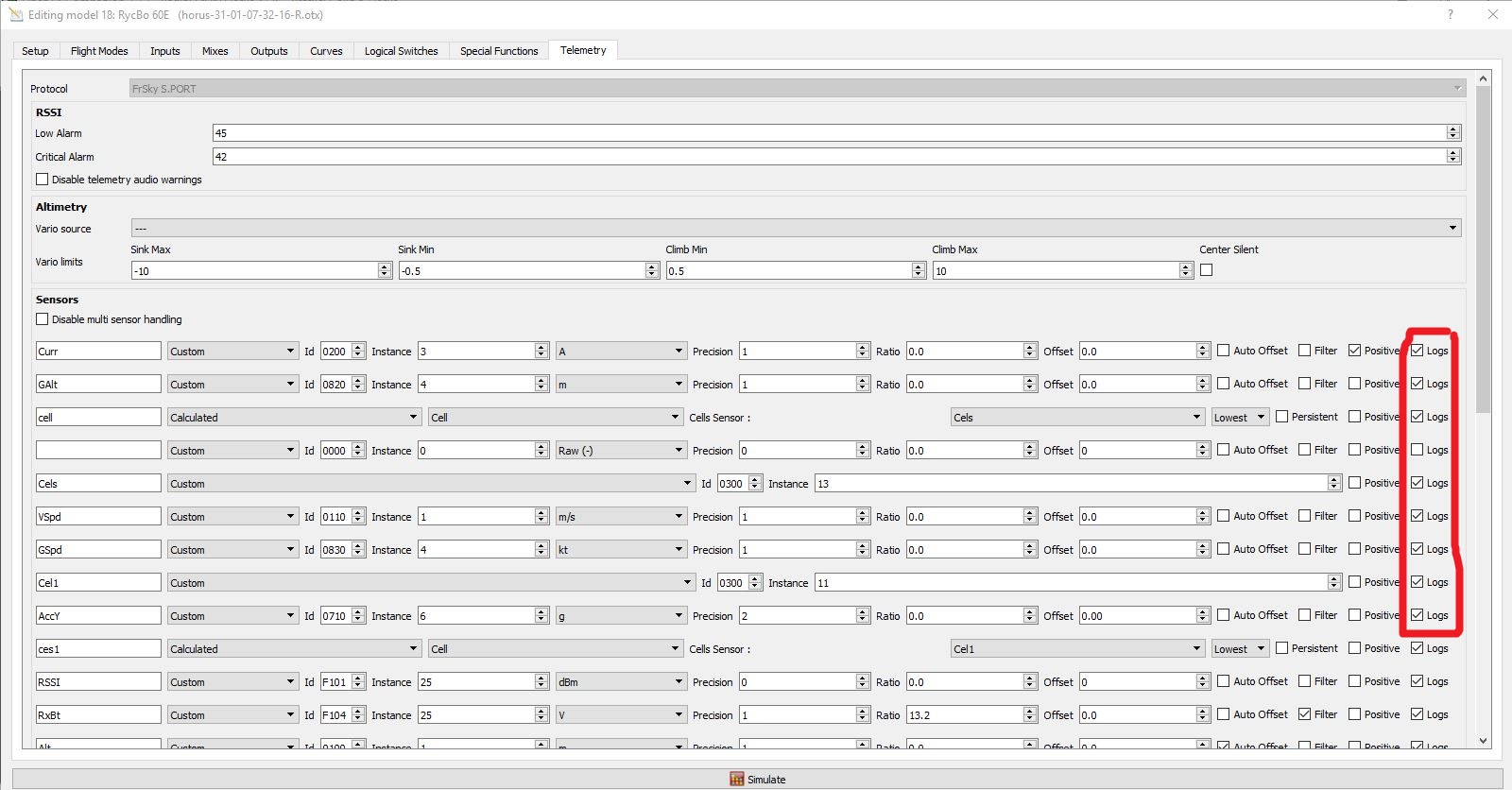
@Cattlebaron I just verified on my setup and the sensors I expose to OpenTX are actually logged to the csv file that OpenTX produces as “SD Logs”
All you need is to discover them first
cheers,
Alex
Hi all,
new Taranis X9D public beta: version 1.8.0 beta2
Note 1: OpenTX 2.2.3 is recommended for it frees some extra memory for lua scripts
Note 2: if you install the script in a new model and upon start you get an error, please redownload it for I fixed a small bug with missing configuration files
new features:
-
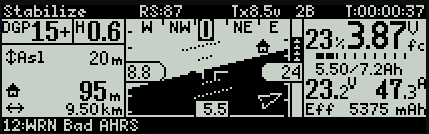
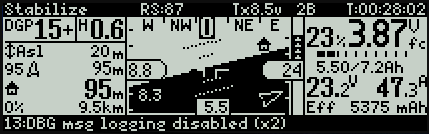
layout changes:
hud left now is speed, hud right is altitude, middle bottom is vspeed
total flown distance is shown below home distance
vario on the right -
extra screen reachable by pressing [PLUS] twice
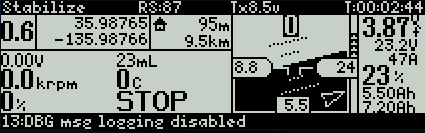
Here up to 6 sensors can be defined by editing the per model lua configuration (example included in the /MODELS/yaapu folder)
@ChrisOlson this was designed with gas suite users in mind, could you test it with one of your setups?
It’s possible to define multipliers, labels, warning and critical levels in the conf file.
There’s also the option to define lookup tables, when a sensor value is found in the lookup table the script shows that value instead of the sensor one, in the example the script shows STOP but sensor value is 0. (it has been tested to display kero jet turbine sensor data) -
support for @Eric_Stockenstrom “Plus” firmware, the plus version sends extra info for waypoints,airspeed and throttle, the custom left panel can be enabled by selecting “m2f” in the script conf menu
-
voice playback of selected mavlink messages
-
script reset is now possible without power cycling the radio by pressing long [ENT] + flight reset, motors should not be armed and the flight timer should not be 00:00
-
fix to skip flight mode vocal announcement for very quick flight mode changes, like flipping a switch from pos 1 to pos 3
-
messages can now be logged to a file on the SD card, this must be enabled from the conf menu
-
haptic feedback, has to be enabled from the menu
-
more options to silence the incoming message beep
as always feedback is very welcome,
cheers,
Alex
Great job Alex!!! Gongrats!!!
indeed I missed that part, thanks Colin for pointing it out!
your welcome buddy you have a enough on your plate just helping out
1 Like
Alex, this is cool! Yes, I will test it. Where it says krpm, can that come from the internal ArduPilot rpm library as well as a FrySky sensor? I don’t remember if that is one of the passthru sensors or not.
Hi Chris,
at the time only from frsky sensors.
Getting rpm from the ardupilot stack would require a library change on the ardupilot side!
If you could test all this it would be great!
I’ve been looking for flexible solution for quite some time now ![]()
Sensor numbering is
1 - 2
3 - 4
5 - 6
Sensors 1 and 2 have fixed font (small)
The configuration file is quite easy to deal with, for instance the krpm config section is
-- Sensor 3
[3] = {
"ENG", -- label is ignored on taranis
"RPM", -- OpenTX sensor name
1, -- precision: number of decimals 0,1,2
"krpm", -- label for unit of measure, on taranis is appended to the value
0.001, -- multiplier if < 1 than divides
"+", -- "+" track max values, "-" track min values with
2, -- font size 1=small, 2=big
110000, -- warning level
120000, -- critical value
},
You can use the same sensor twice, one for engine rpm and one for head rpm by using different multipliers.
Alex