hi everyone @Leonardthall
really stocked with copter 3.6.10 autotune i was able to autotune my aircrafts without any problem in copter 3.6.9 but with this version i always have oscillates after autotune .
because of too many problem and modification i was did a full parameters wipe and configure this hexacopter from over
i did everything in tuning doc step by step http://ardupilot.org/copter/docs/tuning-process-instructions.html
my copter was flies ok after tuning-process-instructions without any oscillates
but after autotune i have heavy oscillates in loiter, althold, stabilize
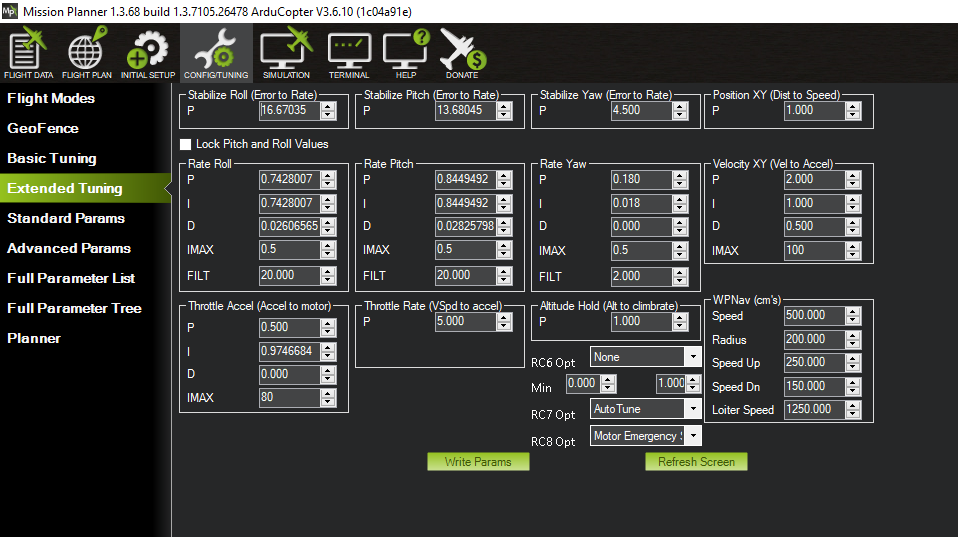
note : i didnt change input shaping parameters because i dont know that i must reduce these values or directly change input shaping parameters ?
At hover your average motor output is ~1800 and some instances at max on some motors. I doubt you will get a good Autotune with this craft as configured.
@dkemxr
weight of my hexacopter in this flight was 2600g
AirGear 350 motors can generate 800 thrust at 3s battery
so my build could generate 6*800 = 4800g
so pressure on every motor is 2600/6 = 433.3g
with this calculation my hexacopter is hover at 54%
i was set MOT_PWM_MAX to 2000 and MOT_PWM_MIN to 1000
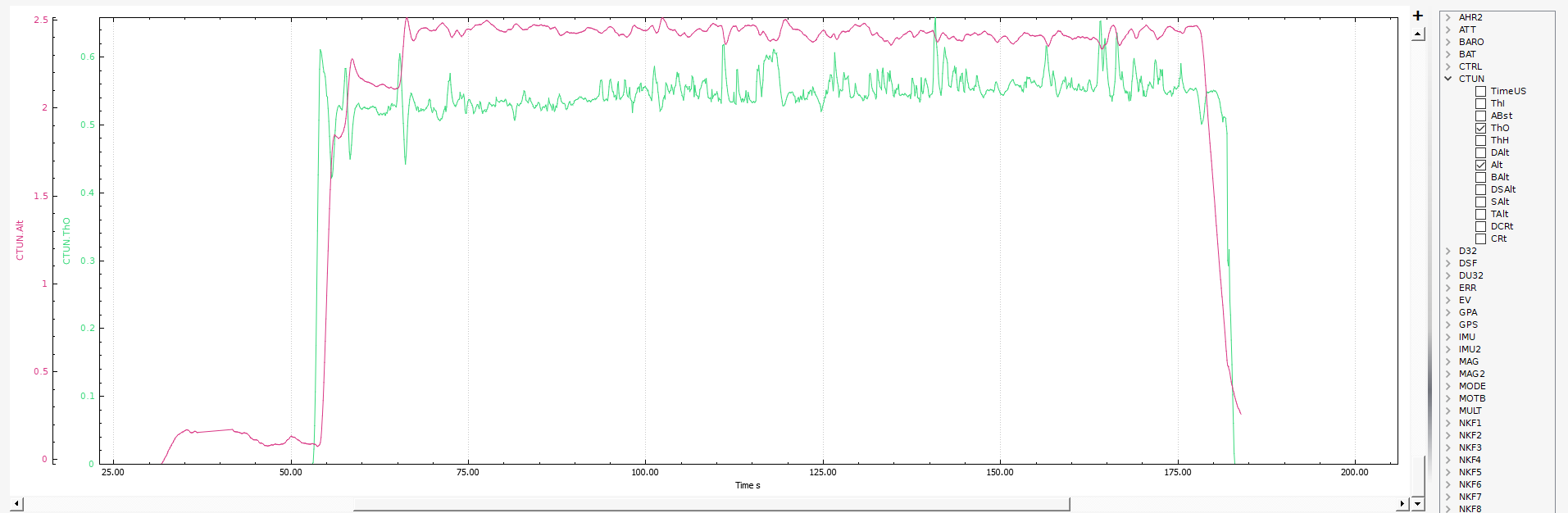
but i cant find why my motor output is ~1800
with this calculation it must be 1500 to 1600
also if we look at log file the calculation is true and copter is hover at 0.55 of throttle
Where did you get your thrust figures from?
Did you actually measure them?
If they were from an online source, we rarely find them accurate.
When you quote the thrust for the motor you leave out the most important part, the prop size.
For whatever reasons, your thrust calculations do not transpose into the real world.
Your PWM output values tell the real tale.
How well calibrated are the ESC’s?
Who knows what Joerg Quinten has done here. Where are you getting 800g thrust? There is no current shown in this table. Is your current sensor calibrated Hosein?
I would simply go 4S power. I would suggest 6S but those components won’t handle it.
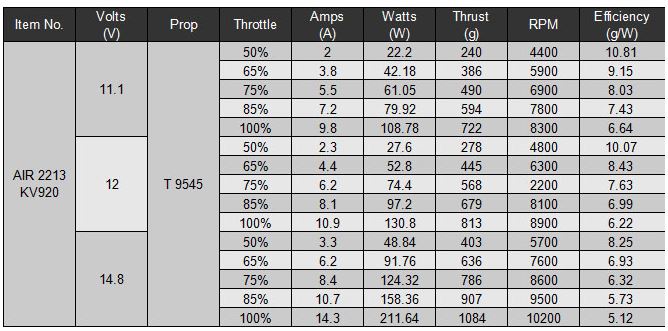
Not that I believe this anymore more than Joerg but here is more published data.
This table is published by t-motor
Yes my current sensor is calibrated and my current using and flight time is matched together
Look at row 5 and row 10
At 11v i must get 722g thrust at full throttle and at 12v i must get 813g
According to the chart your expected thrust at 50%, which is what you should be working to, is only 1668gm.
So your power system is a bit shy of the mark.
So you would not reach hover with your weight craft until at least 65%.
Then consider the differences in testing environments.
How was that chart generated?
Air density?
Temperature?
Elevation?
And you can always expect those figures to be optimistic.
So you are thinking that with some parameter change you will achieve a proper 2:1 thrust/weight ratio? I don’t think so. Not much more to discuss in this thread, you need more power at that all-up-weight.
what I learned from looking at the online charts and from practice is, take 1/3rd of the maximum thrust to hover at 50% throttle.
ie: a motor with 900gms max. thrust, will lift 300 (+or-) gms at 50% throttle. ( It will give you headroom to add little things at the end of the build.)
The thrust is not proportional to PWM so you tend to get a lot more thrust when you move from 50% PWM to 100% PWM than you got out of the first 50%. This is what the MOT_EXPO number does, it linarises the thrust. That is why your throttle is showing a little over 50% thrust but your PWM is much higher than 50%.