Hi Guys, I’ve built a heavy-lift quadcopter. It flies well in stabilize, altitude hold, and loiter mode.
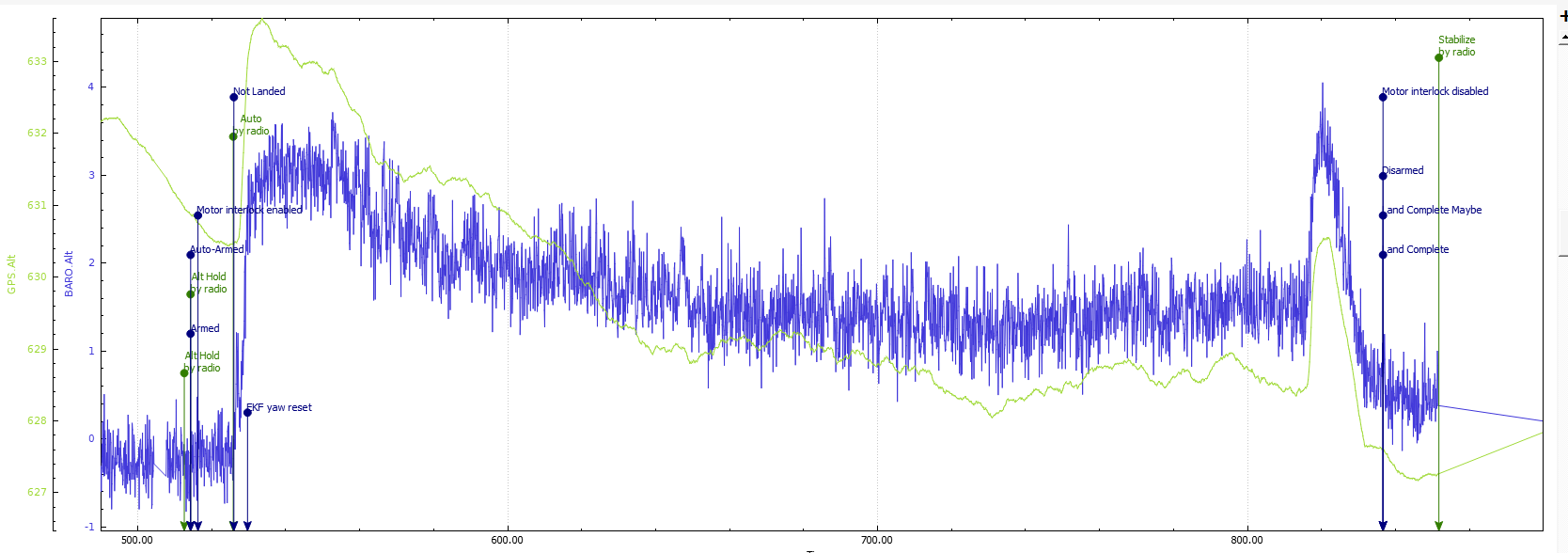
but when it flies in auto mode, the copter loss the altitude. starting with 3m height at take-off and then start dropping to about 1-2 meters, and then come back again to 3 meters height when the copter back to home position.
Update to latest stable firmware
Consider running the baro and wind compensation procedure.
Try reducing prop wash across the flight controller, this could be easy (a cover) or hard (longer arms, smaller props, complete redesign)
Consider using a more accurate GNSS system or a rangefinder especially if low altitudes are part of most flights.
A simple/cheap fix (compared to some options) is get a GNSS unit with baro, and ensure the mast height is above most propwash when traveling at some lean angle, then disable the onboard baro.
CUAV Neo V2 Pro GNSS (Neo 3 doesnt have a baro but does have an improved GNSS module)
mRo Location One GPS w/ Compass and Barometer
Matek AP_Periph GNSS, M10-L4-3100 GPS Module
There’s probably some I’ve missed but you can search
Sure, with the old firmware you are using. Read this: High speed auto mission
43m/s with standard hardware with good stability and no loss of altitude. It’s improved further since then.