Finally got back to this project. Log file below.
Commanded 30m/s and achieved 29m/s and 65deg lean angle
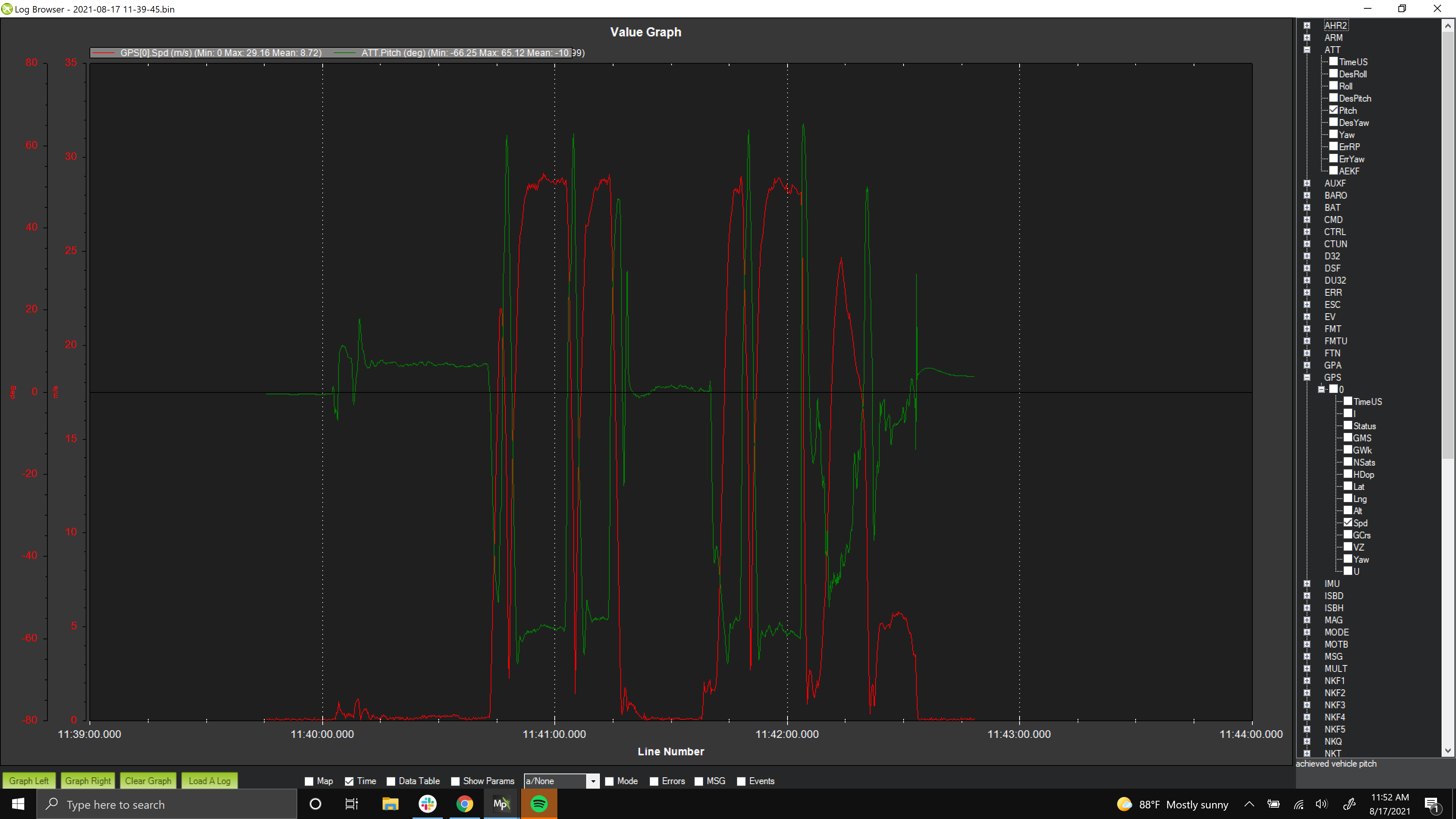
https://drive.google.com/file/d/14B2xfiiAQQZW0R7Pi7ris3TbRKvogBNX/view?usp=sharing
I will turn it up a little bit more. I also want to get the missions to be more “flowy” from waypoint to waypoint, meaning less braking as it comes to a waypoint and a smoother direction change to the next waypoint