The altitude increased too suddenly when i gave takeoff to 3m command. It was out of control and crashed. I am attaching a telem log below for reference.
I have a rangefinder attached on it but i have set EK2_RNG_USE_HGT to -1.
i have seen multiple times the logs but not able to get the answer.
Please help.
The .bin log file from the SD card or downloaded over mavlink/USB will be best.
You’ll probably need to host it somewhere, like dropbox or google drive, and share the link here.
Apart from EKF issues, there seems to be vibration warnings in that tlog. It will be good to see the .bin log to know much more.
The bin log generated was without fmt messages, thats why its not opening in Mission Planner. The firmware i was using was arducopter 4.0.5, the same setting i have flown previously with 4.0.3 and that was fine.
Is this problem related to the firmware ?
@amilcarlucas@xfacta
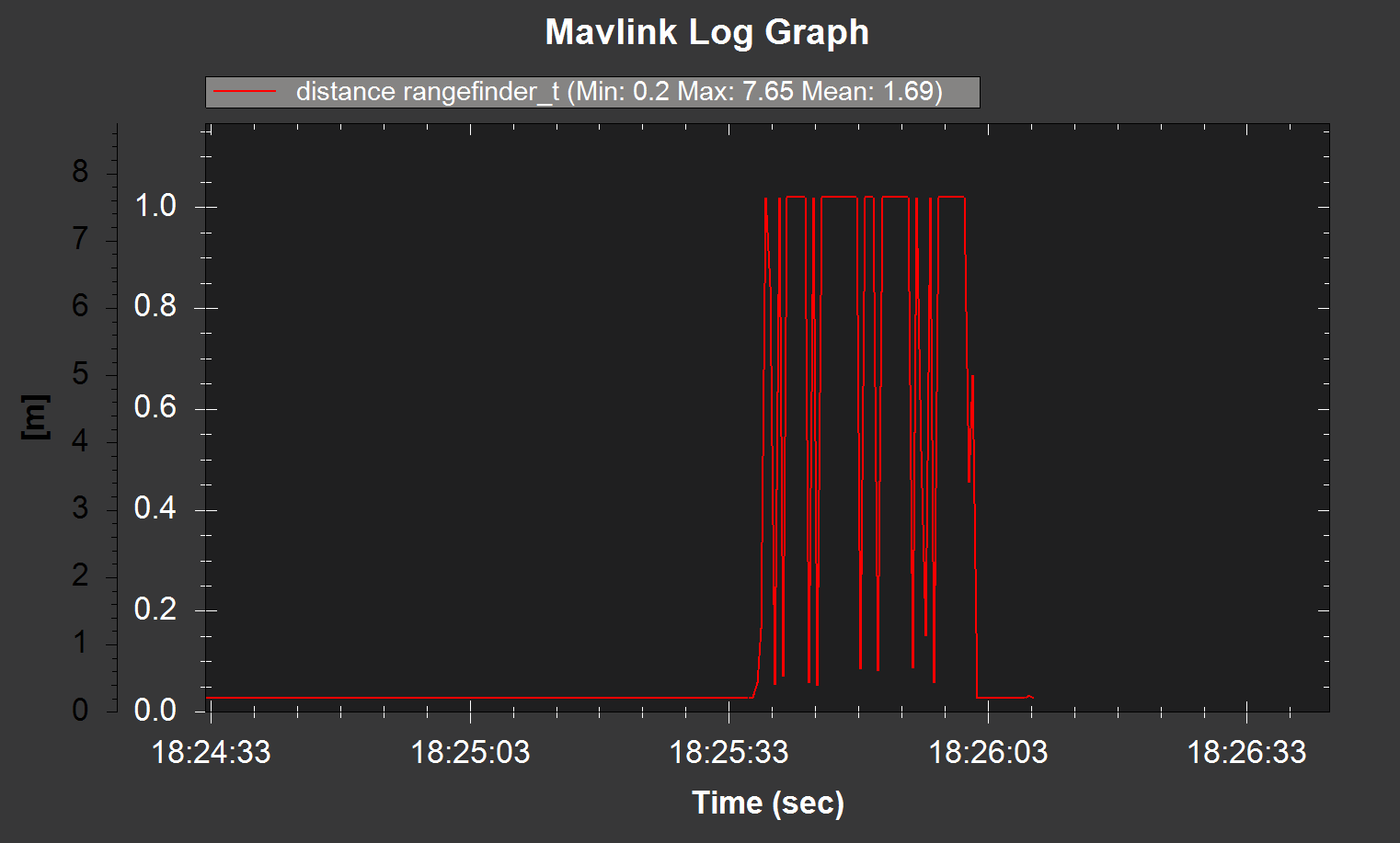
The rangefinder data I was getting was updating from 20 to 700cm and back. But I have set EKF2/3_ALT_SORUCE=0 and EK2_RNG_USE_HGT = -1. So it should not affect the altitude.
I have checked the voltage, which is fine. Also i have checked another sensor, on bench test it is behaving same.
Can i filter the readings of the sensor through configuration.
@amilcarlucas@xfacta I have changed the sensor and it behaves in the same manner as previously.
What I am doubting is on the PIXY behavior with rangefinder data.
As I have disable the use of rangefinder in normal flight, it will be taken into consideration only when the PLND is enabled.
One of my freelancer friend had the same error.
He was doing precision landing using irlock. 3 times it land perfectly but after that it went from 15m to 60m and was out of control. The behavior seems very unreliable.
He was also using maxbotic i2c rangefinder.
Need to know the reason as it is serious and may lead to loss of equipment and more. @ThomasSFL Require your help here.