Hi Łukasz- Post a link to the flight log of this flight. Looking at your other post with a log I noticed you have INS_ACELL_FILTER at 5Hz. I think this is too low even for a big quad. How did you arrive at that?
What parametars are using in AltHold mode but not using in Stabilize ?
I try found list of parameters responsible for althold.
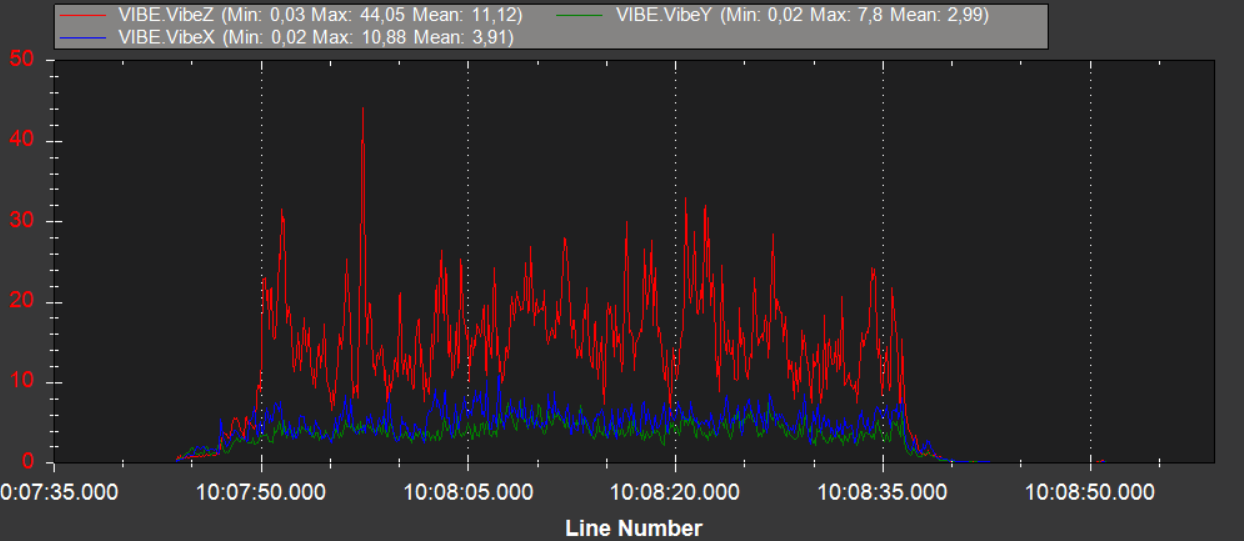
Stabilze mode working good without any oscilations. Alt hold or Loiter in XY axis are working no bad, only Z Axis oscilate as video shows (keeps horizontally in all mode and keep XY with Loiter but Sound of all 4 motors/proppellers is oscilation evenly Up/Down in Z axis ).
This is not a Vibe problem, it’s a tuning problem. 1st, set the INS_ACCEL_FILTER to 15 and make another flight to see if the vertical oscillation is gone. Also, these are very low
ATC_ANG_PIT_P,2
ATC_ANG_RLL_P,2
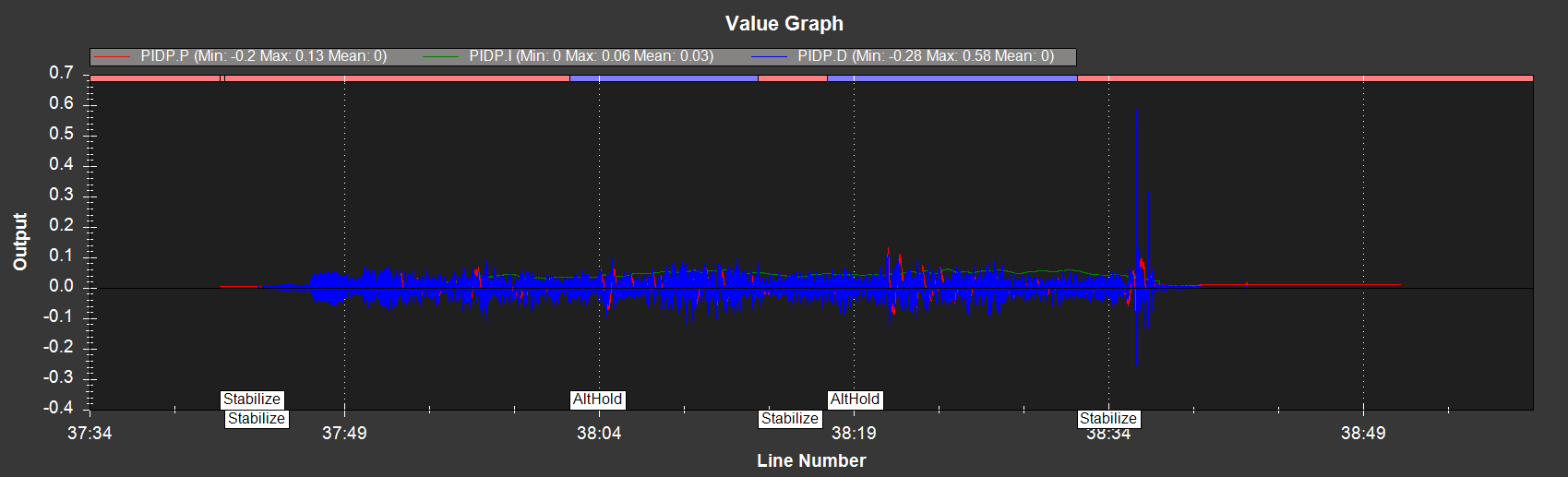
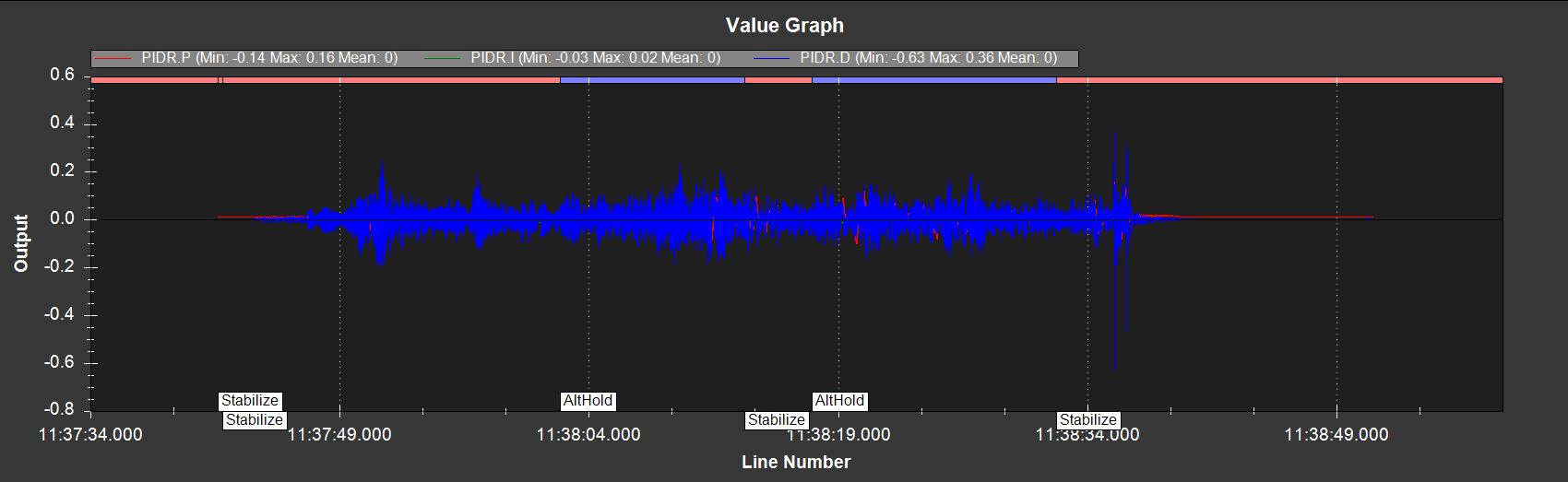
I would set the accel filter to 15Hz. Hosein’s suggestion of setting the ATC_ANG_PIT/RLL back to default (4.5) is good also. And before the next flight set INS_LOG_BAT_MASK to 1 so we can view the Vibe FFT data. It’s useful at this stage of tuning.
Take off in STABILIZE and increase altitude to 5m. Switch to AltHold and be ready to switch back to STABILIZE. If the aircraft is hovering at a very low hover throttle value you may hear a reasonably fast oscillation in the motors. Ensure the aircraft has spent at least 30 seconds in hover to let the hover throttle parameter converge to the correct value. Land and disarm the aircraft.
Maybe it’s my problem ? My drone have too big power for weight , so can take of with 20% of thrust. I changed Spin Max to 0.65 , then can control, else was wery agresive.
if it was good my idea to lowering mot_spin_max parameter to 65%?
After that my drone no vertical moving in stabilize mode about mid stick of throttle and then can changing between AltHold and Stabilize mode without change throttle position.
i’m sorry for lot of question, i try to understanding how ArduPilot algoritms work but it’s very big documentation. I’m very begginer of drone topics.
I’m very greateful for all your help.
In Poland people isn’t helpnes like here.
My project isn’t typical and not easy.
Small model of it working perfectly
I don’t think so. You will probably need dynamic thrust above mid-throttle for when it’s flying autonomously particularly right after you drop it. The MOT_THST_HOVER learn function should adjust so you can switch between AltHold and Stabilize w/o requiring a large throttle adjustment. But with the very high thrust/weight ration you have Stabilize mode will be a handful no doubt.
More battery weight would be the best solution but I think you can get it flying OK without dropping the MOT_THST_MAX value. You will probbaly want that thrust to get the paraglider in the air!!
[quote=“dkemxr, post:18, topic:62795”]
You will probbaly want that thrust to get the paraglider in the air!!
[/quote]Then working other (my own) controller ;). i need full thrust range for paraglider towing to 300-400m AGL