Hi I need now the communities help.
I built a Peon 230 based copter with Kakute F7 AIO FC using Chibios and a NEO 6M GPS with integrated compass. My Radio is now the Taranis 9xD Plus with the X8R .
I went through the complete first installation process in setting and calibrating the copter completely and to my belief correctly.
The first problem, which led me to the second problem, I encountered was that the EKF remained red. Due to a poor satellite signal, so no arming. It did not mater which configuration I chose, I got max. 10 satellites the mean number was 7. Funny wise I got more satellites under my roof window inside than outside on the free field with blue sky. I read a post that with copter 3.6 there might be an issue in configuring the GPS. So I tried to step down to 3.5. I missed because I could only find the 3.6.2 version for the Kakute Board. This is currently my arducopter versionI have installed. Nevertheless it did not change anything! I now remained with the value 67 to get GPS+SBAS+GLONASS.
In order the to get a white EKF in the HUD I changed the EK2_GPS_Check from 31 to 3. So just NSats and HDop as preflight check.
The third Problem is that the compass deviates around +13° even after various calibrating sessions which I concluded always ok.
As I could not find a better situation I wanted nevertheless to check how it behaves when flying.
Big Mistake!!! I am currently printing all parts again, all!!! 
Before the flight I checked how the copter behaved without props.
Quite aggressive reaction of the throttle in stabilised mode in Alt Hold the motors ran to my felling very stable with mid revs.
So I decided to go with props Alt_Hold.
Before the start I checked the gps with 7 satellites (I know poor).
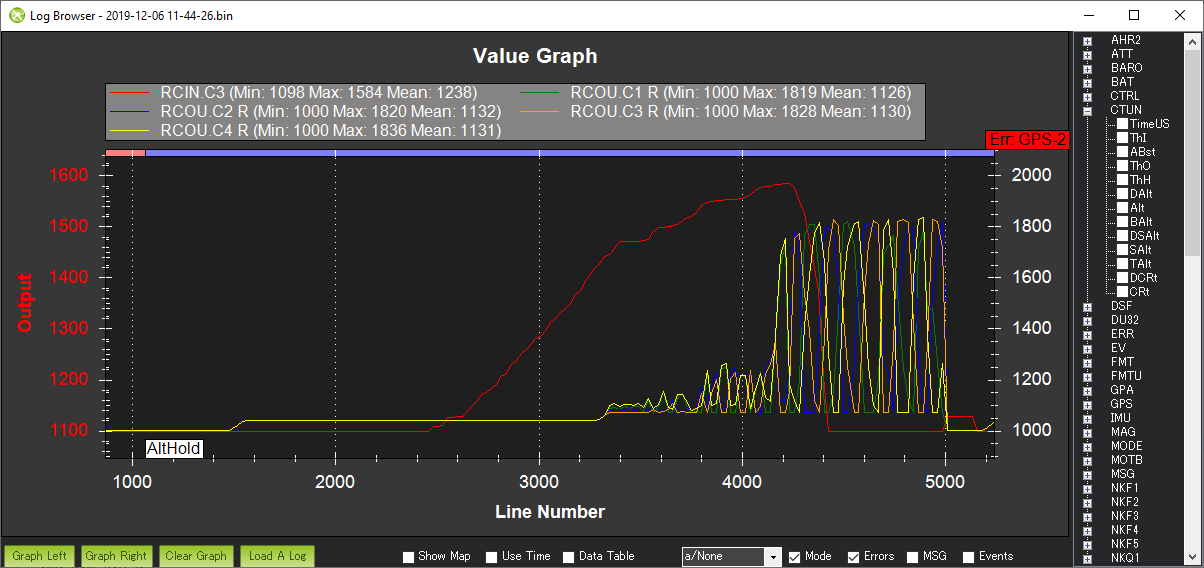
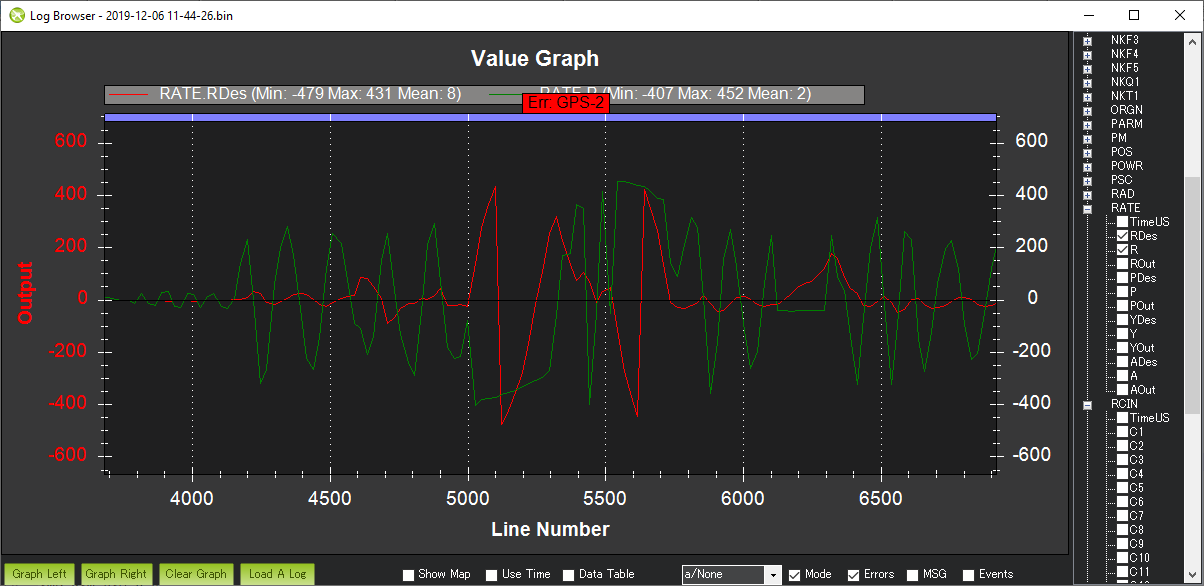
In the middle position of the throttle the copter took off with some toilette bowling, but not very heavy. I put a little bit more throttle and then it flew away in the sky and did not react on the throttle position anymore.
With the climbing speed the copter showed I was very stressed, so I decided to cut off the motors. It fell, I then switched on the motors again. It recovered but went up again with the same speed. I did this 2 times then I crashed.
Except of one antenna leg from the X8R and all the plastic nothing was damaged.
Could you please explain me what did I wrong? Is it a vibration, GPS or compass problem? The copter flew quite good with Betaflight.
I would be really grateful for your help. I put already so much time in this project I must get it going.
I will attach the log of the flight as well as the params file.
Thank you very much for your help in advance.
Kind regards,
Andreas
2019-12-06 11-43-30.tlog (212.4 KB) 2019-12-05.log.param (15.4 KB)