I am currently building a 7-inch FPV drone.
The drone is capable of stable flight, and I have applied notch filters as well.
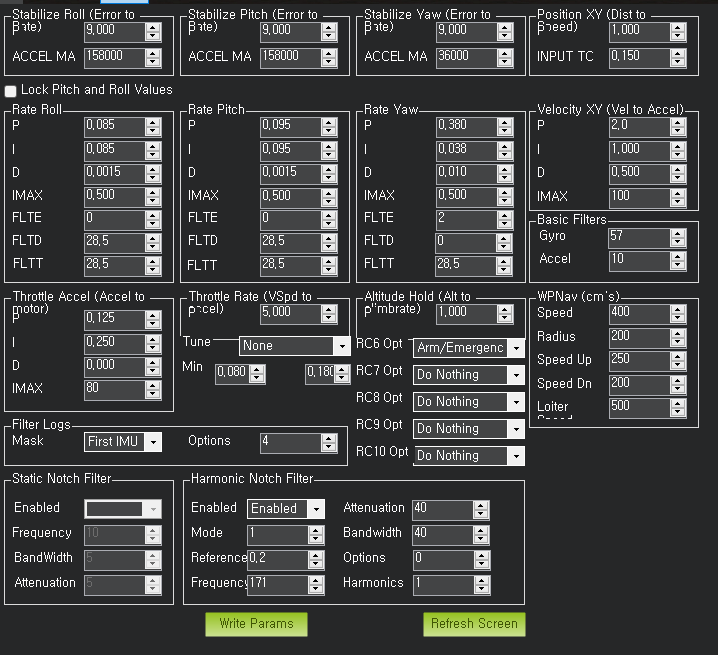
Here’s my original setup and short flight video.
I believe the current PID values are reasonable, but I conducted autotune to increase the maximum acceleration values.
Considering the flight time, I only performed autotune for the Roll axis first.
I conducted tuning with AGGR set to 0.075.
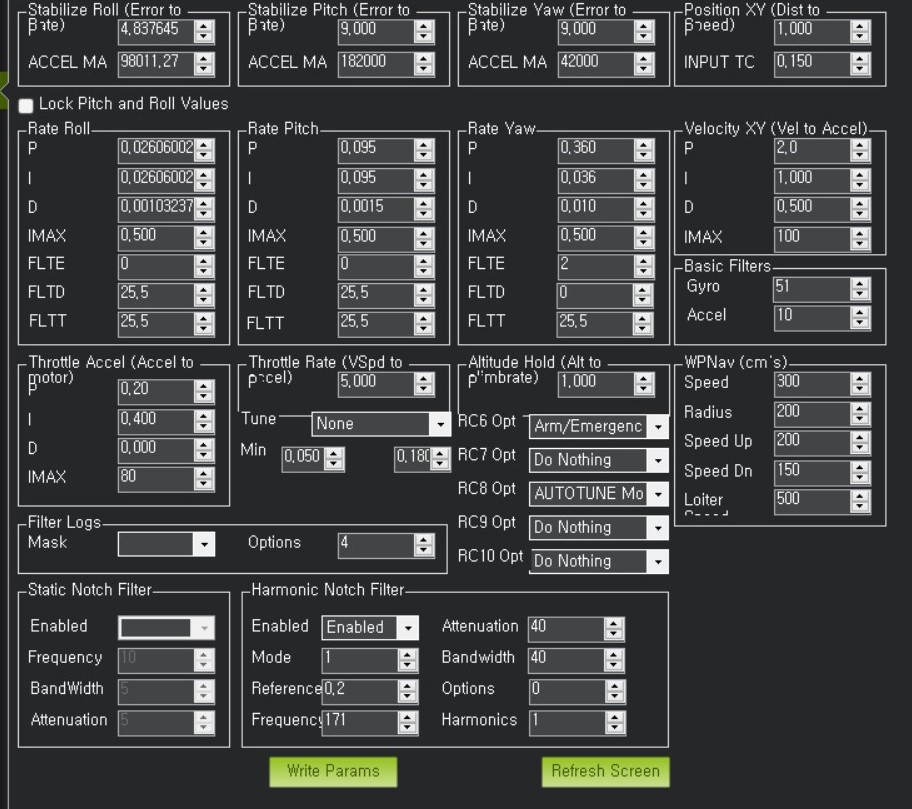
After confirming the “Success” message, I landed and checked the values.
However, as shown in the attached photo, the values turned out to be lower than I expected.
Performed Autotune in Loiter Mode Instead of AltHold Mode
However, since Autotune is based on AltHold, I believe this shouldn’t have caused any problems.
Landed the Drone Once During Autotune
Override was triggered during this time, but I think it did not affect autotune. I didn’t disconnect the battery, and the Autotune AUX channel switch remained in the High position. I also confirmed the Autotune “Success” message.
Vibration Issue? Notch Filter Issue?
Unfortunately, I accidentally deleted the most recent flight logs.
Instead, I am uploading a log from a previous flight.
The values are almost identical, and the vibrations are generally good, averaging 3–5 and
staying below 10.
Should I try Autotune again, or should I manually adjust the values?
My drone uses pusher-style propellers (not puller), with the battery mounted underneath the frame and the payload on top.
The center of gravity is well-balanced.
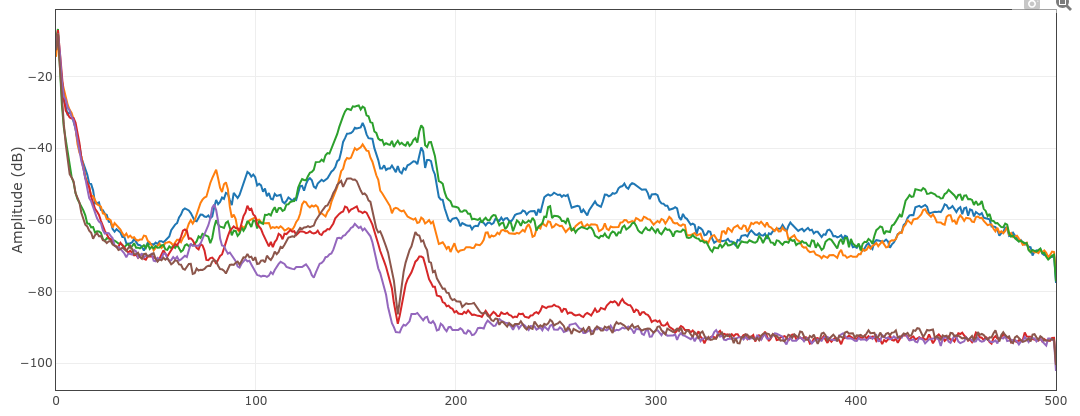
The notch setup is throttle-based, which is way suboptimal for a 7" FPV setup. As you can see from the picture above, it tries to cancel some noise which is approximately in the right place, but this is a quad, four motors with never coinciding speeds, and you’ll never cancel exactly what you want. Such setups typically have ESCs capable of bidirectional DShot, which should be used for notches.
Such noise may indeed be harmful to AutoTune and may result in very poor tuning, like in your screenshots. Do noise management in a better way first, then re-run tuning.
For an even better tuning, you would eventually want to increase FLTD filters - when everything else is alright, this will further improve the craft response - to values which may exceed 50 or so. Once I had a 9" FPV machine with these filters at 50, and liked it.
Also likely, you would eventually want to tune the YawD axis (bit 3 of the autotune mask) to get even better piloting experience. Don’t forget to set yaw’s FLTD to a nonzero value when you get there.
In short , use ArduPilot methodic configurator software to semi automate the points highlighted by @MaxBuzz in such a way that all is done in the correct and optimal order.
The software also makes sure that all the suff that you accidentaly skipped on your first tune, will not get skipped this second time.