I am working on my new project and I am struggling on what to do. I want to build a 4wd autonomous rover which has a carrying capacity of 500 kg. I have bought four 1000 w engines 48 V that I want to attach to each wheel.
My problems are:
how to attach each wheel to each motor, perhaps without using a chain?
I have bought a Roboclaw motor controller 2x60Ah inwhich I want to attach left motors to one output and right motors to the second output. Is this feasible?
I am afraid that the torque of the motors are to low for this setup, and if someone have any idea of what types of motors to use instead? And if there are brushless motors what type and what ESC I would need to combine it with a Pixhawk cube orange?
you do not provide much information about the motors you have. If you want to avoid any sort of gearboxes, chains, etc. you should use hub motors. I use motors/wheels from broken hoverboards just as @geofrancis does. They usually come with street tires, but there are some with offroad tires.
I recently found this shop:
They seem to have a wide variety of hub motors, but I have not bought anything from them yet.
thank you! This is a good idea!
Sorry for the lack of information, MY1020 48V 1000W Electric Go-kart Brushed DC Motor with a torque of 3 Nm.
I found this on the website you provided:
This engine has a torque of 100 Nm which would fit perfect for my case. however, how compatible are they on a Pixhawk cube? What motor controller and ESC do I need for this to work?
The website is a bit vague on the motor details. But looking at the photos it seems most of the motors are sensored brushless. Three power wires and 5 or 6 sensor wires ( 3 signal, 5V, Ground and temp perhaps).
So skateboard ESCs like the VESC or robotic ESCs like the Odrive should work.
Thank you so much. Yes, there is not much information and I will email them for more details.
I looked at the specs of the Odrive Pro, and it can handle 3000 w. However, I would like to use four 1000 w engines, do I need two Odrive Pro`s, and is it possible to use two Odrive with Pixhawk?
The original Odrives were dual motor controllers, but it seems they changed that. You can not reliably operate two brushless motors with one controller, so you would need four of them. I never used an odrive, because everytime I wanted to buy one, they were out of stock and I bought a VESC instead.
From my understanding they support multiple different control signals and PWM seems to be one of them. But to be sure, read the documentation or ask them directly. If you want something less expensive, Flipsky (VESC design) has this to offer (6kW per channel):
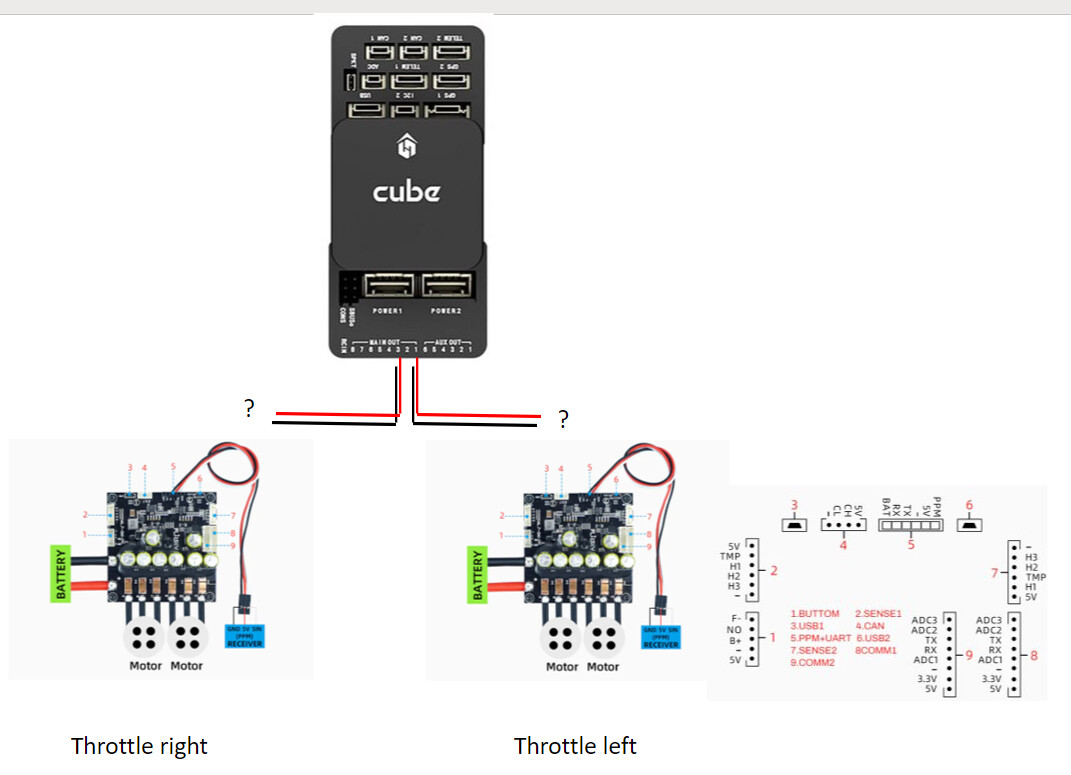
These are all good tips! I think I have everything I need, just one last thing. If you see the schematic I added, where do I connect the main outputs from the Pixhawk to the VESC?
Here is more information about the engiens: Total of 8 wires,3 thick wires are phase wires,1 red thin wire is 5V,1 black thin wire is 0V,and the other 3 thin wires are Hall sensor wires.
The connectors with the blue labels are what you are looking for. You will want to use one VESC for the left side motors and one for the right side motors, not front wheels, rear wheels.
I have now connected the the VESC (Flipsky) motor controllers to one engine each (one motor controller pr engine, two engines total). The setup works fine in the VESC software when I have tuned them, but now I want them to be used through the Pixhawk cube and the Herelink system. I have connected the black wire to - on the Pixhawk and the white wire to the signal on the pixhawk. This does not work, do you have any tips?
Yes i did, but there is no respons from the controller. A cannot continue before I get a respons from the RP APP. Is there a conflict since the motor controller sends out PPM signal and the MAIN OUT on the pixhawk takes PWM?
Does it work at all with the pixhawk or does it exist a PPM to PWM module?
Yes, all of that works. I have respons in Mission Planner and qground control when moving sticks. The engines are working from the VESC software. But there is no stick movement in VESC software.