I highly agree with using PIXHAWK on helis! Once Bill sorted me through the learning curves needed to configure the PIXHAWK and parameters, it flies better now, than it ever has. I am an avid acrobatic/3D flyer and have been since I was 12 (or 14), I am now 44 so I fly a lot. So much so that I have gone through pretty much all types of flybar’s, FBL gyros, tail-only gyros, ETC., and for the last 5’ish years have only flown with tail-only (HH) gyros with no FBL or flybar (no gyro stabilization other than tails). This is because over the years, I have tried most gyros on the market, over time I have had issues with pretty much all of them (high end to cheapo clones) and in the end, I found using nothing but my skills was better and safer in the long run, so thats how I flew for many years. Enter my CP UAV (collective pitch drone) in May 2019, I needed a way to control the collective pitching on all 4 blades with a custom FC, this started me into the world of PIXHAWK (and Bill) 
Now sip ahead a months to now, and its the ONLY FC I run on my TRex 600, CP UAV, and soon to be my TRex 700 (3D). It is amazing, the FC itself is one of the coolest things I have played in general, plus the open source software behind it is even cooler but all that aside, it works, and it works WELL!
That being said, I haven’t flown a 450 in a few years (but I still have many sitting on my shelf) so I looked over the frame and it would be tough to fit in a full pixhawk into the tiny 450 frames but it is doable. MY 470 (also sitting on a shelf) has a slightly more frame room for the FC but still tight. I myself stay away from 450/470’s because they are to small for me nowadays, my fingers are not as good as they were twenty years ago so I only fly and build 600-800’s now (I have tons of 450 parts anyone can have), I have both a full 450 TRex, and a 470L BOTH just sitting on shelf’s being stripped apart for nuts and bolts when I need them for my larger birds. Point of what I am saying here is that I can help you with the 450 build/frame/ETC, and for any questions I cannot answer for the PIXHAWK, the community (Bill and others) can help. I would highly highly highly recommend using PIXHAWK, forget how well it works, forget the cool factor of building it yourself and changing any aspect you want in the code, but once its setup, its bullet proof in my opinion (and I have been beating the hell out of my 600 every day, for the past 3 weeks).
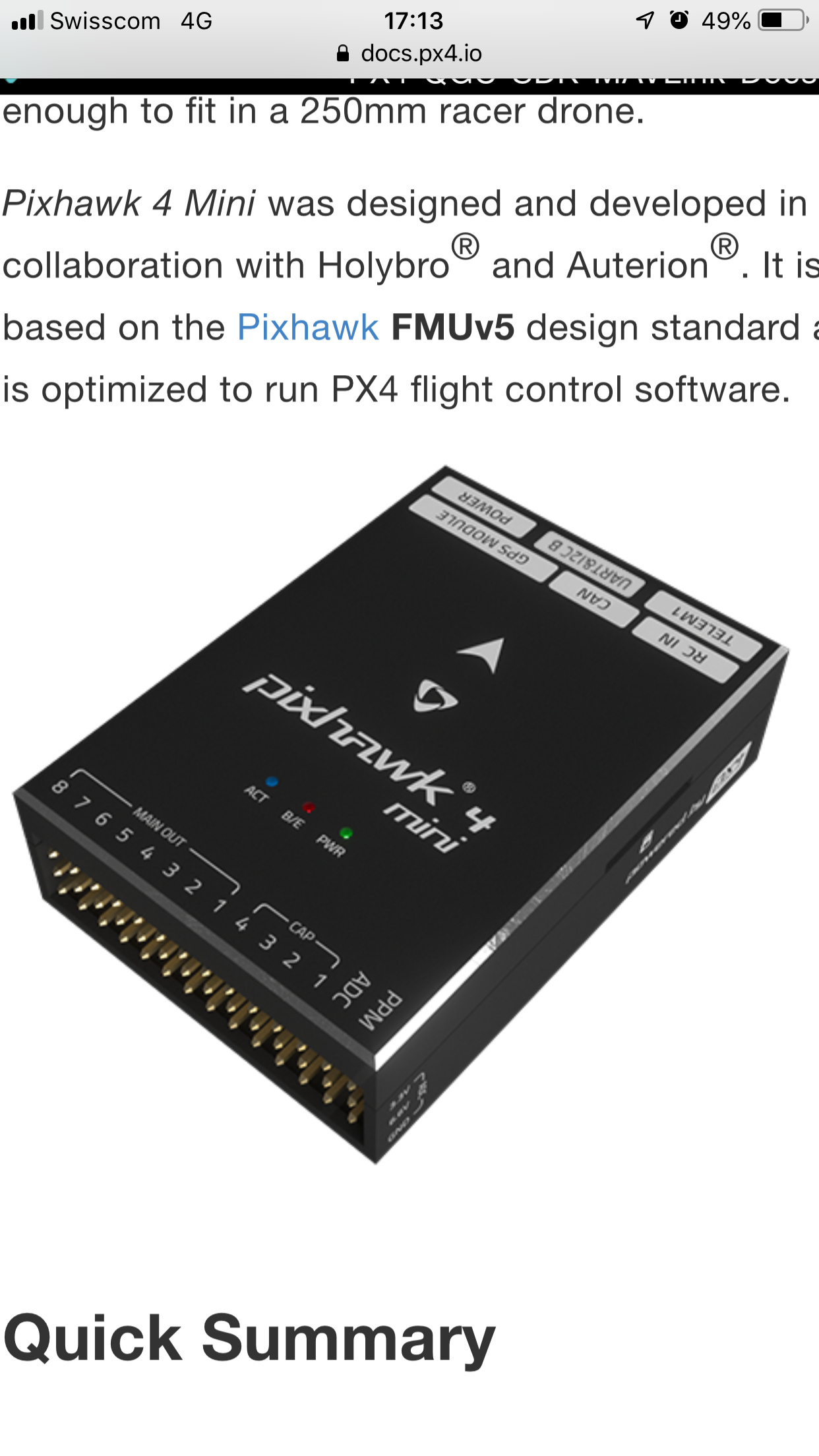
I dont know or own the PIXHAWK mini, but I believe it works the same as the PIXHAWK PX4 and uses the same AdruPiot (Copter) as PIXHAWK. Other users will confirm or deny this fact (since I dont own the mini myself, I cannot confirm this fact myself) but assuming it does run Ardupilot and copter, you’re golden.