Cool. I recommend changes a lot and forget to caveat them with warnings. I think what bit us in the butt on the tail was H_COLYAW which mixes collective to yaw. Your previous setup had no collective to yaw mixing and the default param file has it at 3.0. Also the P gain went up from 0.18 to 0.22. Most of the time when you see oscillations, it is due to either the P or D gain. Most of the other changes would not cause the problem you described.
You could download the file from github and then remove the parameters for yaw axis. Save the file and then use the load parameters button in the full parameter list page of Mission planner.
OR better yet. You could also use the Compare parameters button which will show you the parameters that were changed due to the new file. So download the default parameter file from github and then use the compare parameters button. then uncheck all of the yaw parameters you don’t want loaded. then hit continue. finally you have to click write parameters to load them on your flight controller.
Thanks man, yet again for the help I will do that, I will ‘compare’ them and then uncheck the yaw ones and follow-up. I am able to get the vibes even better than before (but not where it will ultimately be) once I receive my rubber mounts.
We are getting there though better and better with each tweak. I plan to continue tweaking until its as low as I can get it then as stable as I can get it. I will also incorporate the params from the tuning you mentioned (minus the yaw). I only care so much about the vibes because I plan to use this for camera only (no 3D), I save the 3D for my 700 which is balls to wall power.
Found the main cause of the vibes (still even without this they are under 20 for the majority of flight), it only touches 30’sih at the very beginning at spool-up when the blades are not straight. The dumbest thing too, my dang CANOPY isn’t the best at sitting still during flight. I first noticed the canopy wobbling ever so slightly, then I heard a “squeak” that bothered me (thinking it was my tail or belt as this is what caused the one and only minor crash when my tail gear stripped causing no yaw control) so I started to play with the canopy and noticed it was loose, causing the squeaks under collective lift (seemed to lift the canopy a bit then the air and vibrations was causing it to resonate downward). I removed it, and the vibes are almost gone for that entire flight (15-18). I will secure the canopy better from wiggling (but it would never come loose, it just doesnt snugly fit).
Josh,
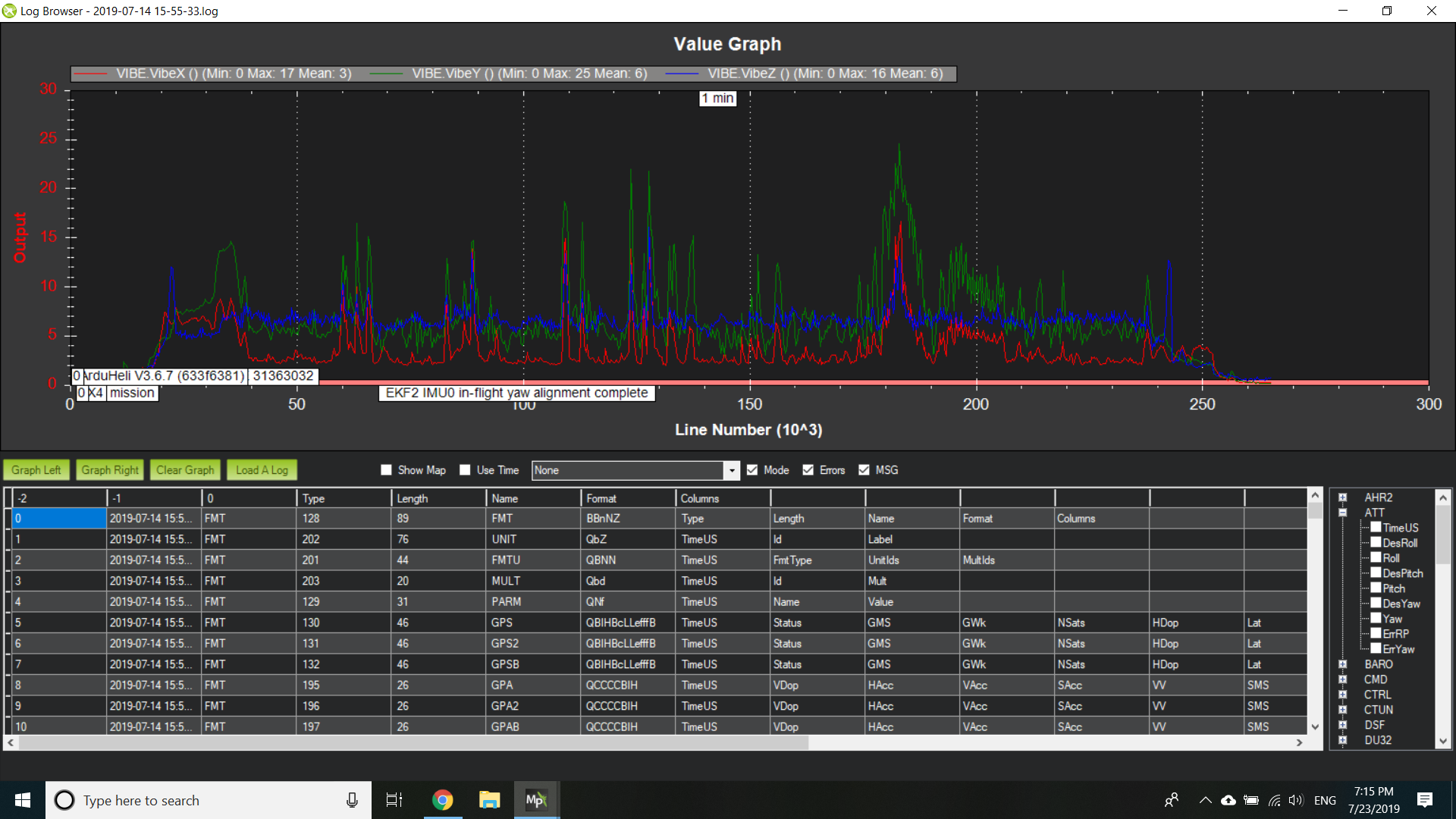
Here are the Vibes from my 600 size heli with a Pixhawk 1 on foam mounts. Most of the spikes are because I was doing a tuning and making large stick inputs. during non maneuvering flight, you can see that they stay below 10 in all three axes.
That’s so awesome, thanks Bill! I believed you without the pics, but the graph pic helps my dyslexia/ADHD brain visualize it better than words so this was very helpful!
ALSO, GUESS WHAT I GOT WORKING?! POS-HOLD, I have been playing around with the parameters and flight modes, tuning it based on your previous post, and the GPS flight modes. At first, no GPS modes would work, but after I rebuilt it yesterday morning, I fixed the issues and now it locks in place, and holds the position. I have never had this before on any helis, I only use the PIXHAWK in my 600, my 700’s are tail-gyro only (no FLYBAR nor FBL gyros) so this is really cool and something new to me (again I have never had a GPS gyro before)! I didnt think it would work, but WOW, I couldn’t believe my eyes when I toggled POS-HOLD switch tied to channel 7 and sure enough, it just sat there and self-adjusted itself to remain in the same position as when I toggled the switch without my hands on the sticks! I couldn’t believe it, that was cool! Since this is primarily going to be aerial photography heli, I can simply hover over the location I wish to photograph, toggle POS-HOLD then my hands are free to snap the pics and move the gimbals to control the camera! WOW! I am so happy with this PIXHAWK that I plan to buy yet another one for my non-3D 700, I have been thinking about it since getting my 600 up in the air. I have two TRex 700’s, 1 strictly for inverted/3D, and the other is more tame, not as aggressive, both are 12S/HV so I will need to think the voltage but other than that, I plan to pair up my 700 with a new PIXHAWK!
I am having the time of my life flying this thing now, I seriously get in at least 3 flights a day now (yup every day) but usually more like 5 or 6 flights. NEVER before has my TRex 600 bird flown so perfectly, I am still dumbfounded how the FC fixed my tail issues, it makes no sense but I dont care, I am floored at how well it works!
FYI, just ordered a brand new 3DR PIXHAWK (brand new but the original 3DR versions), I found it pretty a decent price for it with all the goodies I need for my TRex 700 in the 3DR model (leftover stock). No way I am trusting anything but an official 3DR or HOLYBRO in my 700, that thing is way to expensive and dangerous to mess around with anything but an official build (3DR/HOLYBRO). I know even the official ones can still have issues but I figured its still safer than going with a 3rd party build (even though my RADIOLINK works fantastic and so does my HOLYBRO but I need a new one for my 700). My HOLYBRO version is in my CP UAV (drone you helped me sort out originally), and the radiolink in my 600, and even though I see absolutely NO differences in the hardware or performance, I dont mind paying a bit more for the official builds on my 700. I have WAY to much money into this bird to risk anything but the best. I cant wait to get my 700 running a PIXHAWK! Thats my Cadillac bird, my 700E DFC HV TRex uses all Savox HV servos, plus tons of upgrades and top of the line parts so I have to tread carefully with this build. I cant afford any issues or to have her down due to failure of the system.
Josh,
Is the 3DR pixhawk you bought a pixhawk 1 or pixhawk 2.1? I don’t think 3DR made pixhawk 2.1’s. I agree there are a lot of vendors of open source hardware and you have to be careful. If you want a Cadillac of controllers and are willing to spend the money, I would recommend CUAV pixhack v3x or v5. I have one of each. the benefit of these controllers over the pixhawk 1 is that they have internal vibration absorption for the IMUs. Even the HEX pixhawk 2.1 is a better choice than the 3DR Pixhawk 1 due to the vibration isolated IMU’s.
thanks, I will cancel and look into the options you listed. Does the manufacturer matter like it does for the PIXHAWK? I know nothing of PIXHACK so that’s why I am asking. I am not sure who makes what or if there’s open sourced or officials available. Or is CUAV the manufacturer, also I am assuming this runs arducopter the same as my PIXHAWK’s (sorry I know dumb questions)?
No all good questions. CUAV is the manufacturer. they are pretty much the only ones I know that call there unit the pixhack. and yes they run the adrucopter the same firmware that you can install from Mission Planner or QGC.
Perfect, thanks Bill, I was looking at the PIXHACK5 originally (before I asked the 3DR question) but the documentation said it was more for academics and such so I frowned away. BUT the PIXHACK 3 looks awesome, is this suitable and what you are talking about (money isnt a huge deal but anything over 250$ will have to be saved a week or so) and I am one of those, pull the trigger NOW, and dont wait, kind of guys. I usually end up buying 2 products, the first, wrong one (RADIOLINK), then the second, right one (HOLYBRO) but I always end up using everything. For example the PIXHAWKs in my 600 and UAV are because I first bought a knock off (RADIOLINK), then an official (HOLYBRO) because I didnt wait, and didnt research, although I find no differences between them, I still want top of the line for my 700. No way is it worth risking an issue because of saving a few dollars on the FC to go non-official. If my 700 goes down, I am looking at a few hundred minimum at least to fix it. I am trying to get better with that and research more before impulsive buying but I am not perfect yet
I may still get an original Pixhawk 2.4.6 along with a better one (PIXHACK) for my 700 and use the 2.4.6 in a new build. The way I look at it, you can never have to many FC’s, I have so many helis that one will always need a FC at some point (or for a new custom project). IDK yet but I like to have them on hand when I decide to tinker a new build.
I have great luck with MrO gear. Quality parts and made in USA. There Pixhawk has the 2 m flash, so cu have room to run. Have the Pixhawk and 3 Pixracers from them and have zero problems.
Joe,
I agree that MRO is another company (and a US company to boot) that produces a good product. however, I think the vibration isolation that is offered by either a Pixhawk 2.1 or the Pixhack series controllers provides a better quality signal without requiring 1/4 inch foam pads. I have my pixhack V5 mounted on a thin rubber pad and I get great signal quality (as good as you can get with a heli ).
Josh, I have nothing against the MRO Pixhawk 1 other than the vibration isolation aspect. So decision is up to you.
Thank you both! I think I will get one of each, starting with the MRO (since its cheaper and I can afford it right now), then go with the PIXHACK in a few months for my 700.
EDIT, maybe not, I might go the PIXHACK now for the 700, then MRO for the UAV later. We shall see, either way though, it will be ardupilot.
 I will do that, I will ‘compare’ them and then uncheck the yaw ones and follow-up. I am able to get the vibes even better than before (but not where it will ultimately be) once I receive my rubber mounts.
I will do that, I will ‘compare’ them and then uncheck the yaw ones and follow-up. I am able to get the vibes even better than before (but not where it will ultimately be) once I receive my rubber mounts.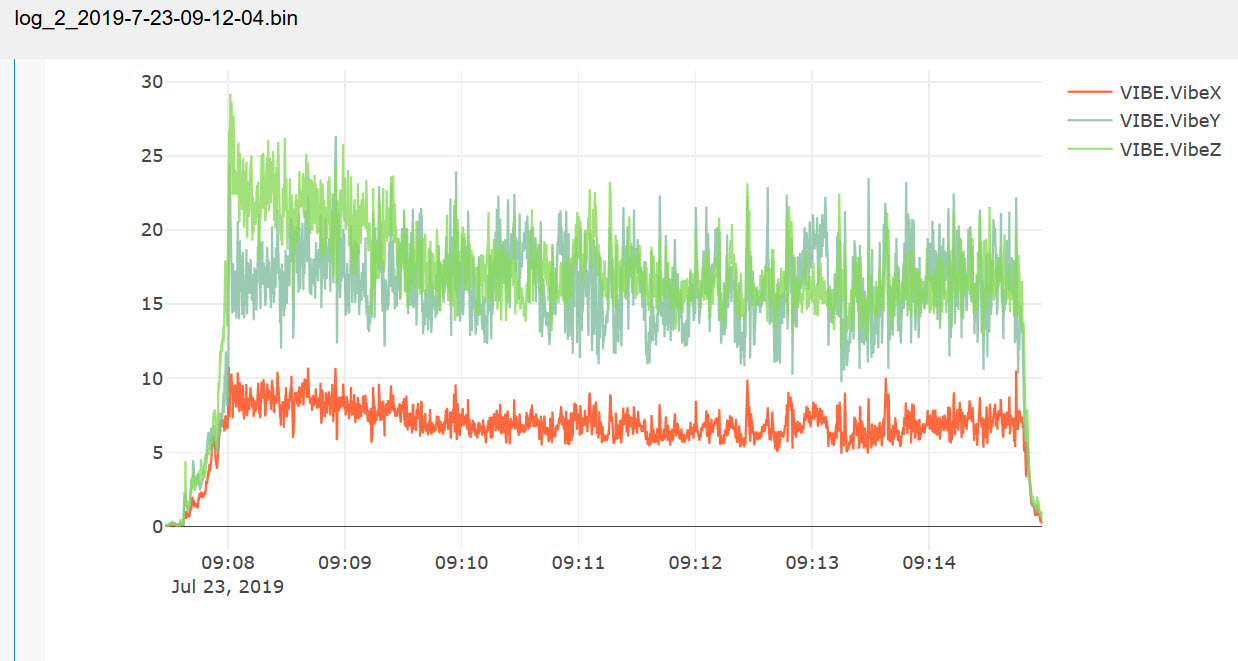


 ).
).