Hi everybody,
Until today I’ve being flying with the ArduCopter 4.0, but now I would like to change to 4.1 because of the improvements that have been added in general.
Sadly, after some tests I can see a behavoiur that I did not see in some versions before.
Before sending my drone in AUTO, I always make sure it responds fine to every external input that can occur during the flight (like strong winds). To do this, I test the drone with some roll/pitch/yaw inputs individually, and after that I try to make some circles moving pitch and roll like in this image :

Normally after I release the sticks the drone stays in the same position it was before. The problem now is that when I do this mouvement, with the 4.1, the drone begins to deviate in YAW. I can see the yaw measure vary so I want to imagine is not a mag problem. I also checked the orientation and the distance of my motors.
In the end, I though it was a problem with the fact of using the EK3 instead of the EK2. This is why I made some tests changing the version and the EKF used.
Results :
In 4.0.7
EK2 - no problem
https://drive.google.com/file/d/1eTLrSPf9gysdoeS2xnmewC6nXV38M39Z/view?usp=sharing
EK3 - no problem
https://drive.google.com/file/d/1uVuDhQ9iDCO1Rd2IxUcmZas8u9zOOFAe/view?usp=sharing
In 4.1.0
EK3 - Problem
https://drive.google.com/file/d/1pfwpVy9dGEIpYuIDfoGQM-dd-0adNGBI/view?usp=sharing
In 4.1.2
EK2 - Problem
https://drive.google.com/file/d/1LnRRnRboEekAt1ZROACN2aBSAYQnikfk/view?usp=sharing
EK3 - Problem
https://drive.google.com/file/d/1-SmN82wjbqLnsKr5orxhFZW9w2I6LaOH/view?usp=sharing
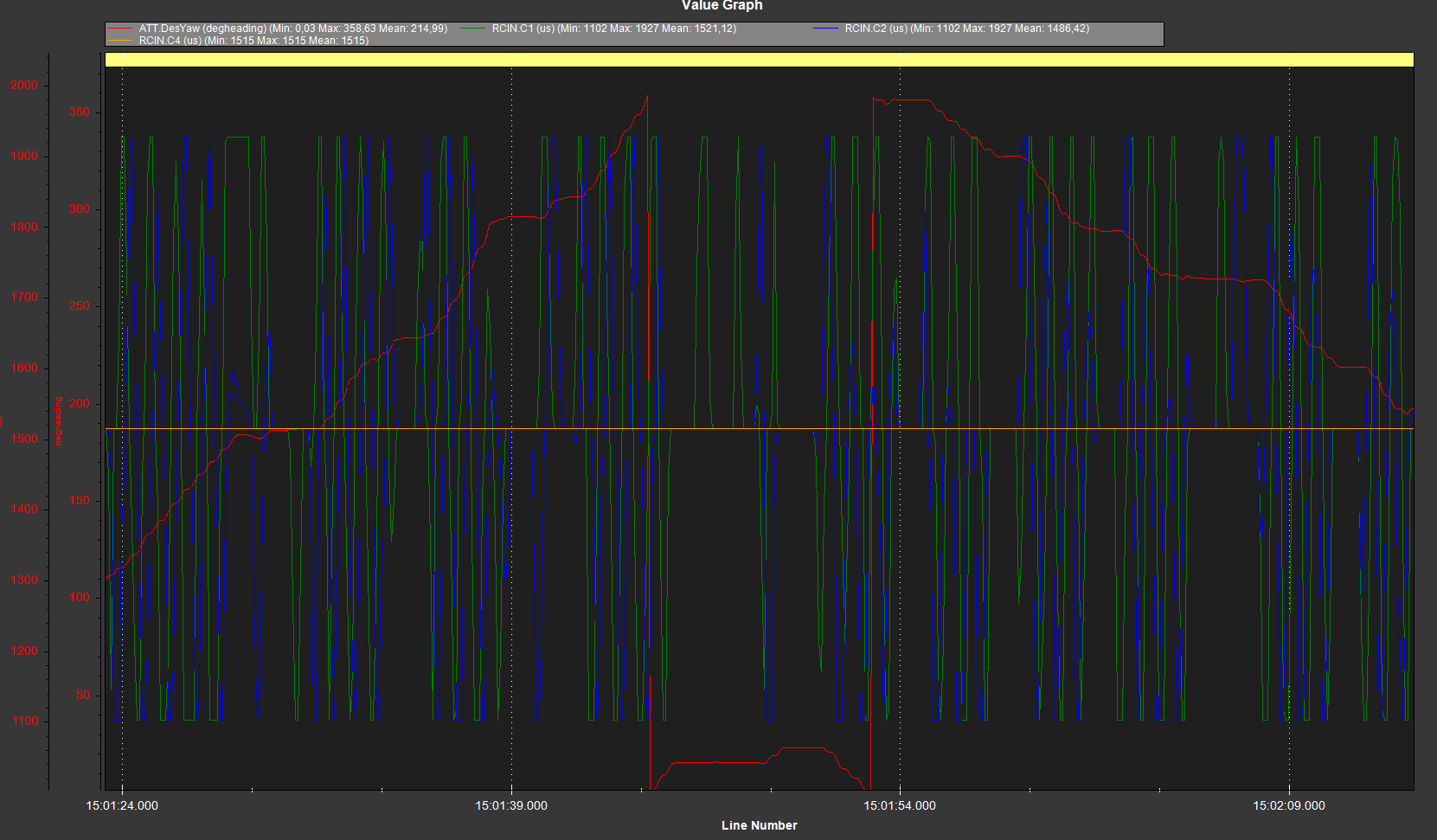
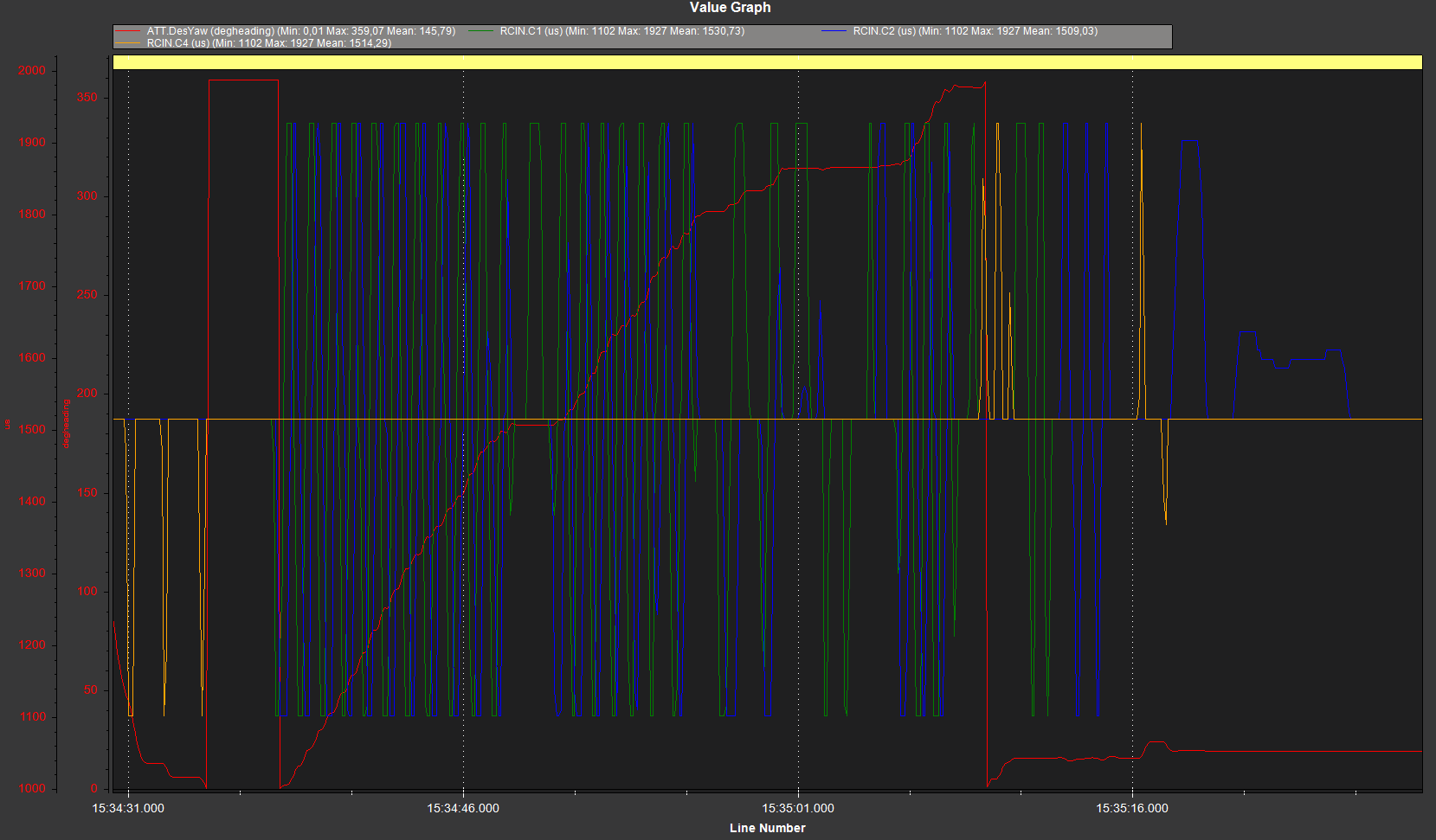
With the logs available, I add some screenshots where I plot the PITCH (blue), ROLL (green) and YAW input (yellow) along with the DesiredYaw (red).
With the evidence of these results, the first thing I did was to check the release notes and I noticed there are some changes that have some relation with yaw behaviour. I am not an expert, so I would like to know if maybe this behaviour is actually desired for some reason I ignore. If this is the case, I would like to understand just why, so I can adapt the mouvements of my drone.
Even if I like the idea of this being a new feature, I hardly think this is the case. I would like to know if I need to change some parameters in order to make the yaw work again as I did it in the previous version, or if this is just something that needs to be changed.
Even if you have a little idea, that would be really helpful.