The quadrotor shoots into the air with full throttle when switched from Stabilize to AltHold or Loiter. Using TFMini lidar indoor without GPS on a Holybro Kakute F7.
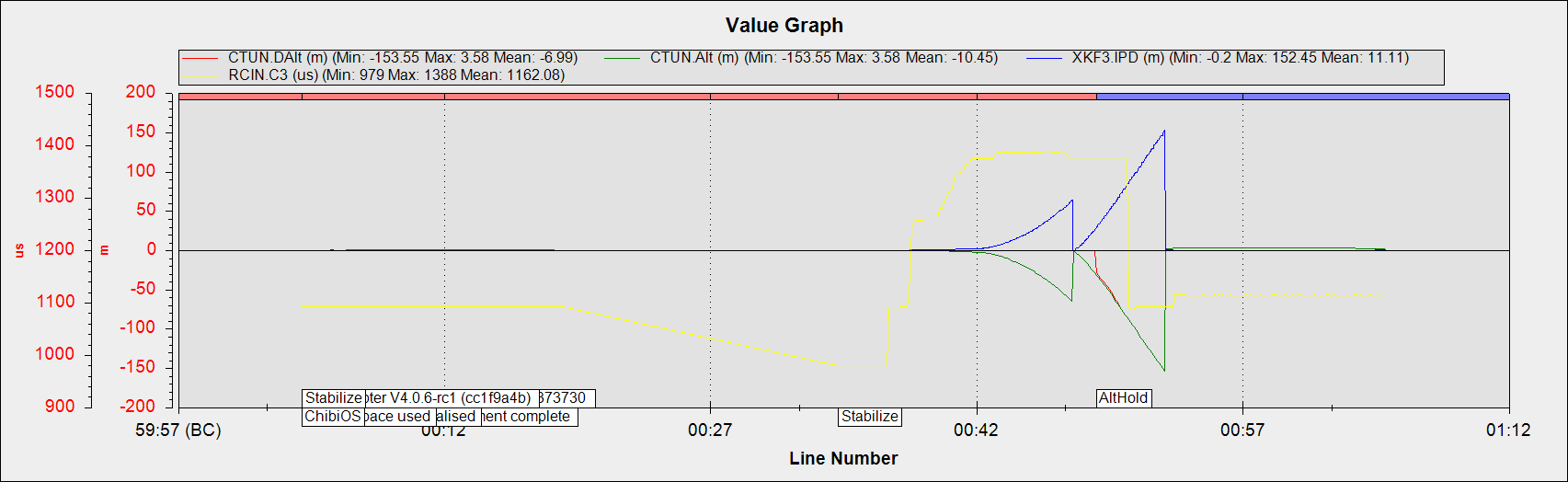
I did a quick check on your log and it’s pretty odd when you switched to alt hold and the desired altitude went all the way to - 150. Can I have the param file? Also did you try alt hold without lidar?
And is your lidar somehow blocked by your landing gear? Even a little bit
i noticed you set arming check as 0. and thats the problem. you are ignoring all arming check and then there is definitely an error. please put back all arming check and see whats the error before arming.
also what type of esc are you using’? I noticed you set your pwm type as dshot 500
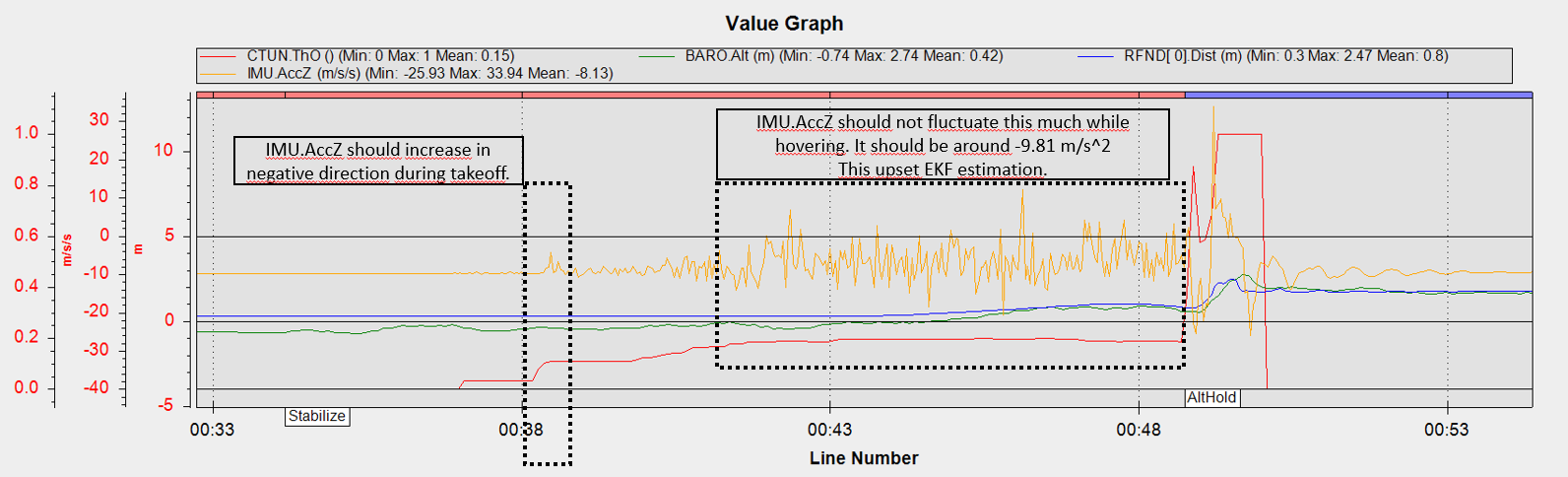
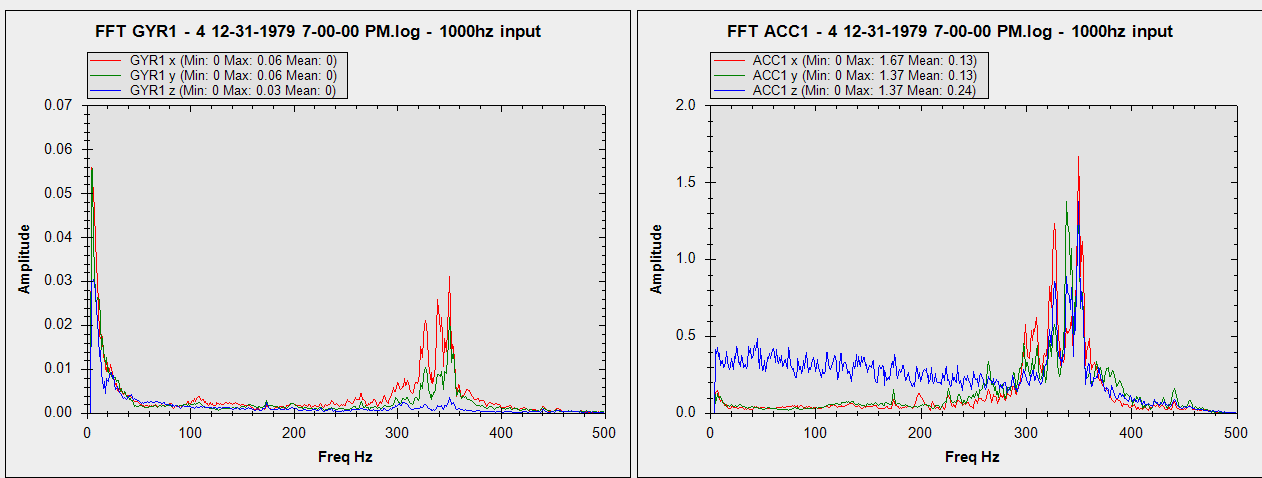
It looks like your IMU is dead. The barometer and rangefinder altitude measurements consistent with each other. While hovering in STABILIZE mode, IMU Z-axis accelerometer measurements are kinematically inconsistent with respect to the throttle output and barometer-rangefinder height measurement.
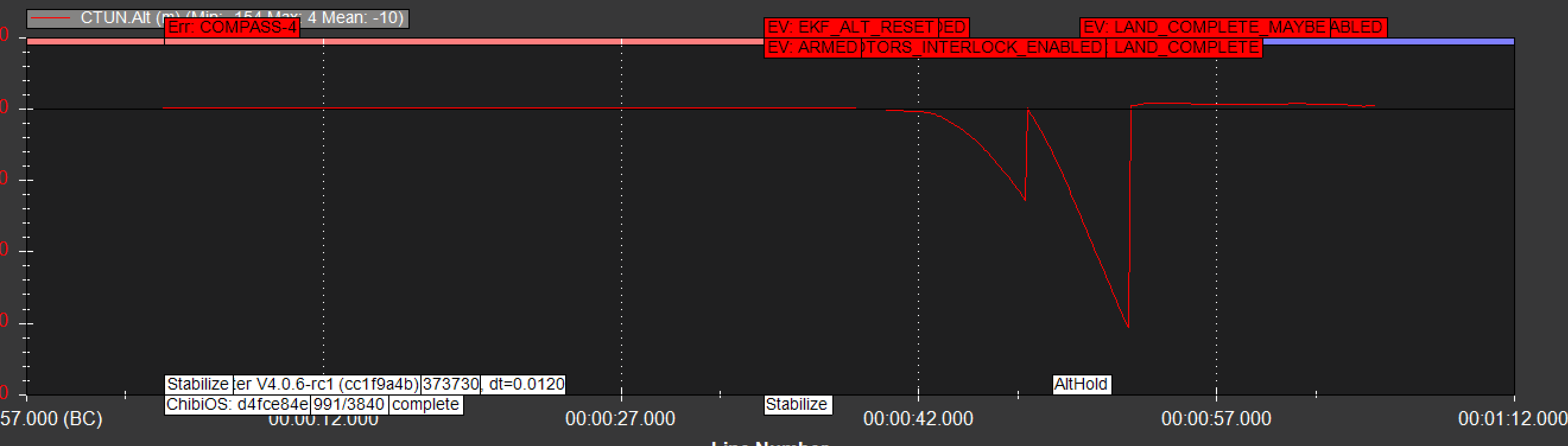
Desired altitude supposed to be the vehicle’s current altitude the moment you switch to ALTHOLD. So, It is expected for the desired altitude to jump to the -29 meter for this case. EKF clear out wrong altitude estimation while hovering, but it didn’t really help.
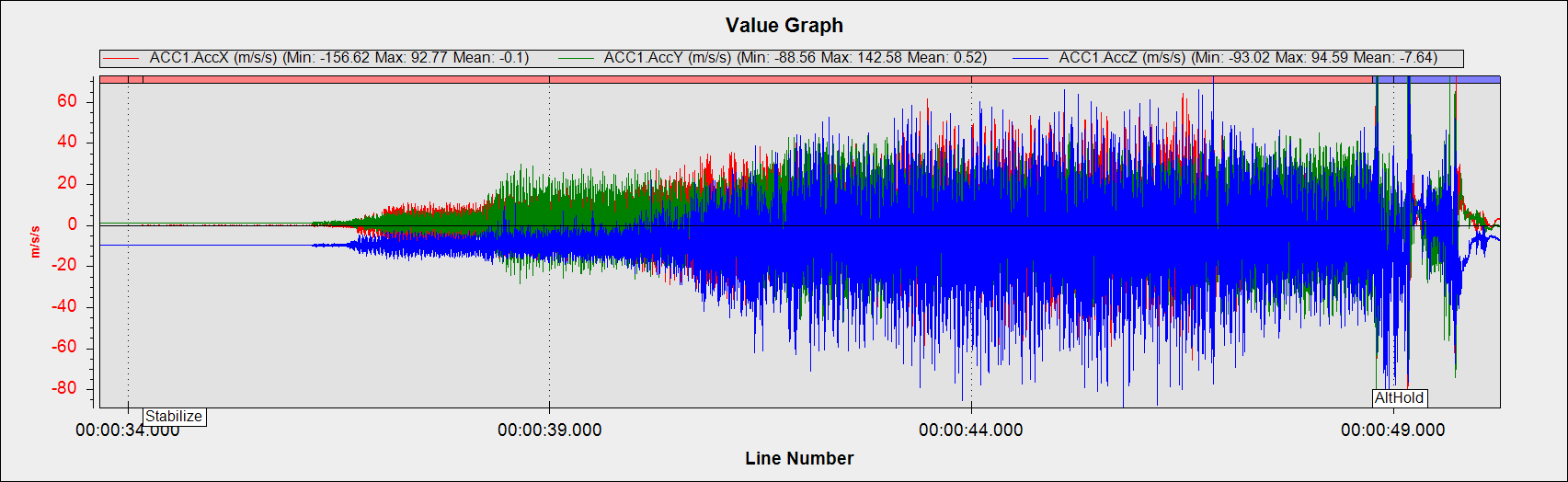
I suggest you to not perform any flight that requires altitude estimation. Perform further flight in STABILIZE mode and check the log for altitude estimation innovation. If you had an accident with this frame, I first suggest you change the motors to see if the vibration is reduced. If this does not help you might have to replace the flight controller.
I also suggest you take look at the following forum post with a similar problem.
Thanks a ton everyone! We solved the issue by soft mounting the flight controller (which I thought wasn’t needed since Kakute F7 IMU is already soft mounted). It was definitely an issue with the vibrations!
Here’s a detailed analysis of the situation.
I tested with 2 different quadrotors (same firmware and config expect gains and ESC).
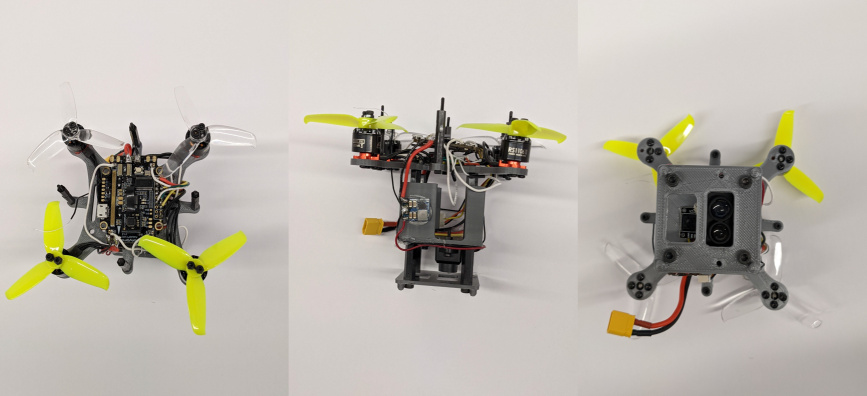
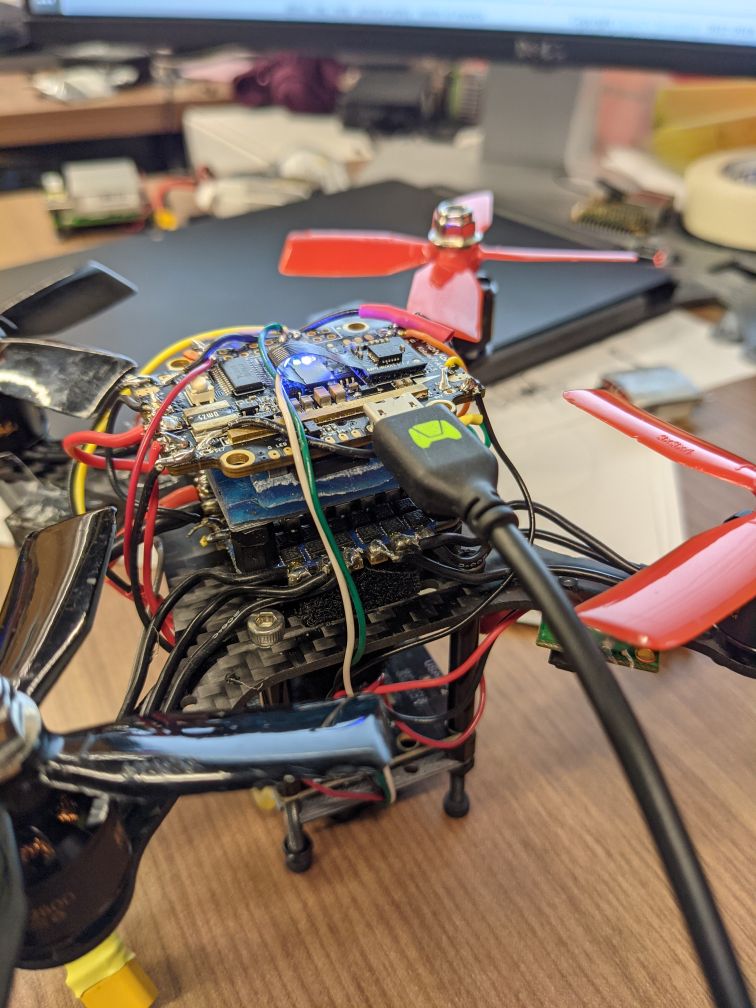
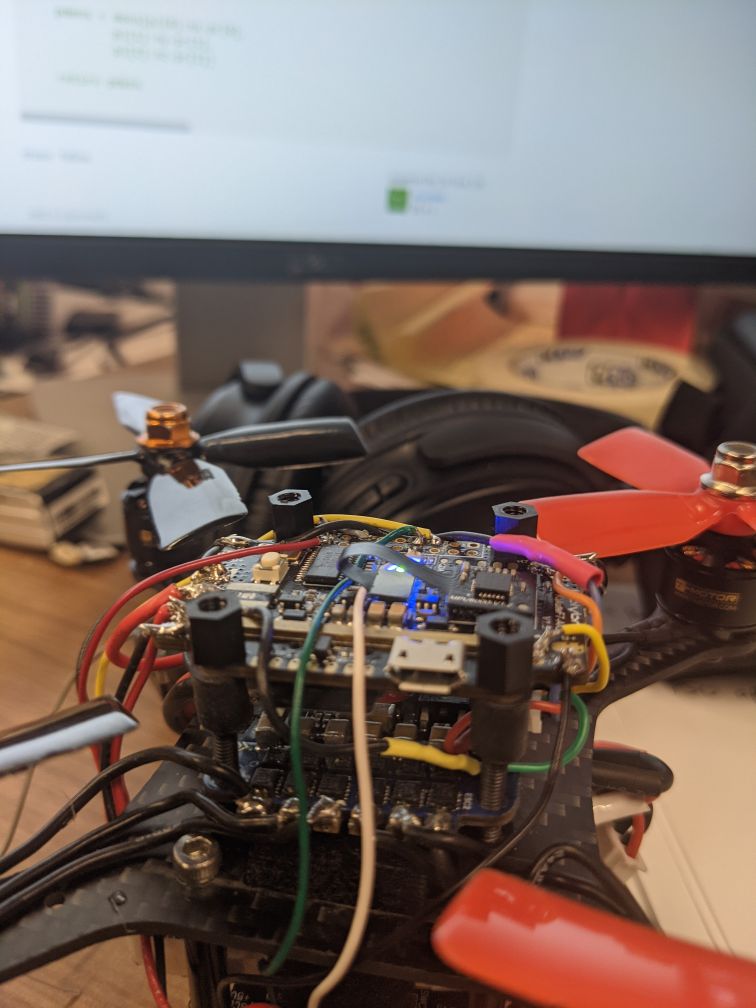
First quad has T-Motor F20 II 2800KV motors mated to 3x3x4 props and a Lumenier 4in1 35A ESC. Photos are shown below:
Both quads were tested on firmware from 4.0.3 to 4.0.6rc1 and give the same results.
Both use TFMini lidar and FPV Optical flow sensor (CX-OF) for indoor (in a netted area) Loiter.
That’s right, nothing. The value is filtering the Gyro raw output before it reaches the control loop. I had a 3" quad that was tuned beautifully after enabling the Dynamic Notch. Disable it after this tune and it was unflyable. There are numerous examples of that posted here.