Hi
Unfortunately, it failed. I’ve achieved a maximum range of 3.7 kilometres and that scares me. I’m making a mistake somewhere, but I don’t know where.
Hi
Unfortunately, it failed. I’ve achieved a maximum range of 3.7 kilometres and that scares me. I’m making a mistake somewhere, but I don’t know where.
Hi,
I wanted to do a range test yesterday but the results show that I can’t continue with SIYI. It does not inspire confidence. I have followed all your manuals and your forum, but the result is unfortunately disappointing. I don’t want to give up but you have to help me. You have to tell me where I am going wrong. Let me tell you about the test I did yesterday.
We did a test at another spot about 5 kilometers away with clear visibility. My friends got in the car with the airunit. Since the antenna cables were short, I bought extension cables. (The cables were tested and the loss was close to zero) Then one of the antennas was removed from the right window of the car and the other from the left window and installed in the car. The Airunit is powered by a feedback card with 12V. Then the HM30 system was installed on the table. 3S battery was connected to HM30. It was made to stand on the table with a small tripod. Square, directional antennas were installed and the direction of TOP was made to point upwards. The R7108SB 2.4 G Reiciever of the Futaba controller was connected to the HM30 RC port. All values of Wireless Mode were tried. The weather was clear and sunny. The longest distance obtained is 3.7 km. In this state, it is impossible for me to fly. What am I doing wrong?
And my old airunit module broke. When I connect the new one to the HM30, I get 3 flashing yellow lights. The manual says that this is a level 1 data overrun error. But I have no idea how to fix it.
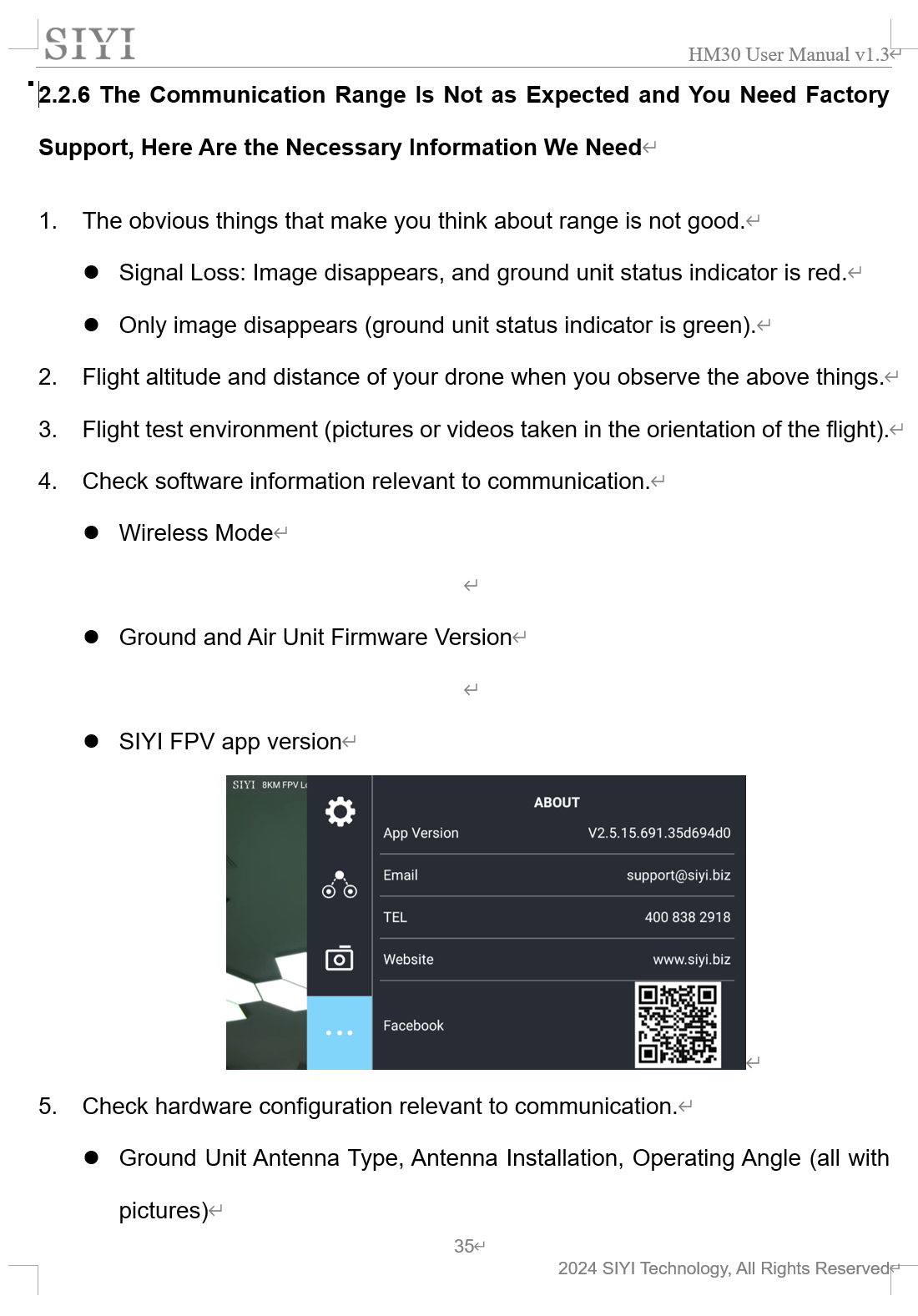
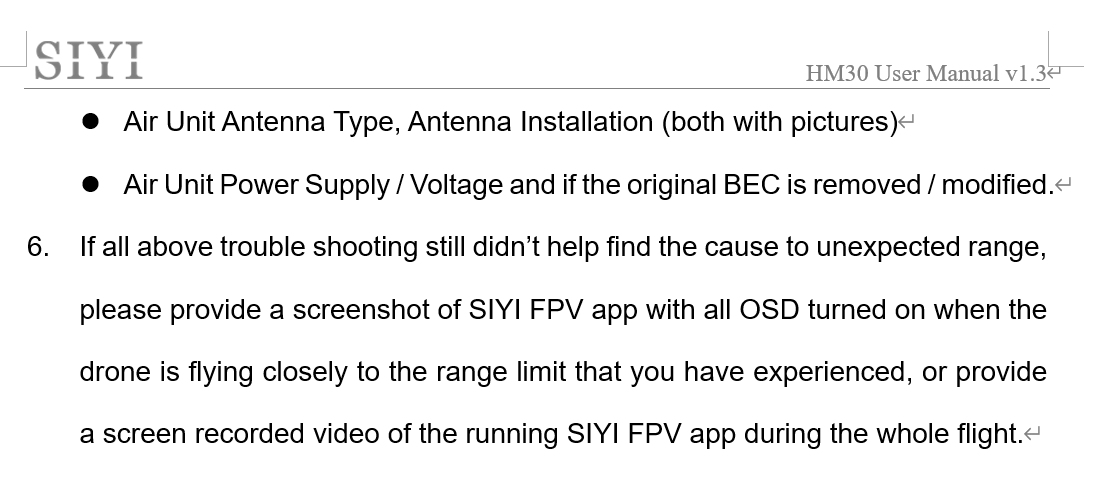
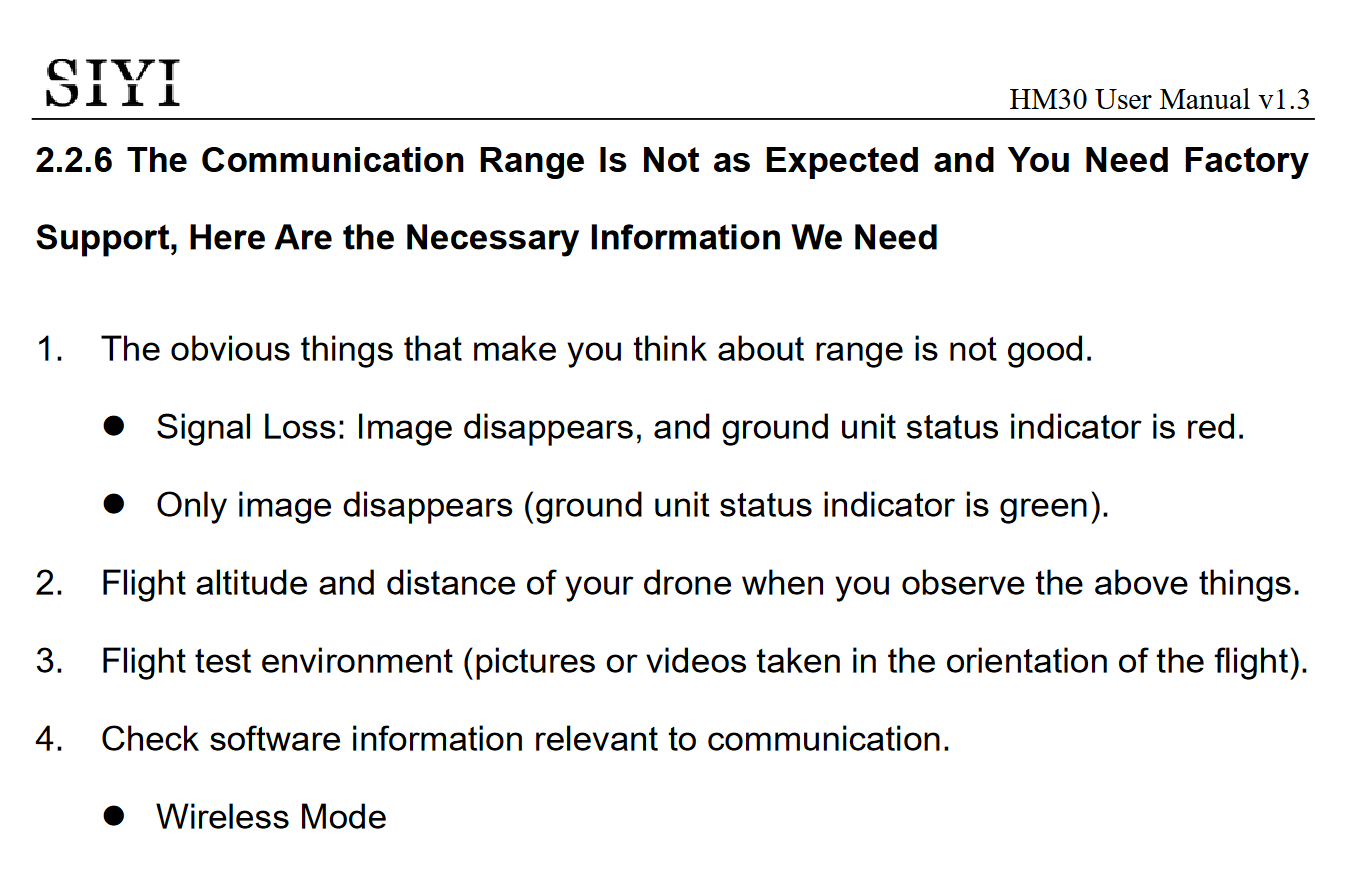
Please try to follow the instruction in the above pictures and add more necessary information.
On the other hand, we suggest that you try more power to the air unit, 4S would be better.
Good day to Everyone!
I’m stuck on telemetry routing to the air unit.
For the testing I use Aocoda-RC F405 V2 https://www.aocoda-rc.com/products/41
with the Betaflight / STM32F405 (S405) 4.3.2 Nov 28 2022 / 07:26:30 (60c9521) MSP API: 1.4
the Ports are set as follows: UART5 57600 Mavlink/AUTO
https://content33-foto.inbox.lv/albums/b/brodnev/29-01-2024/Clipboard01.sized.jpg
T5 to the RX and R5 to the TX wires of the air unit respectively.
I had got telemetry output from my PIXRACER running Ardupilot, but…
normally I’m not using betaflight, so here I’m a newbie;
Do anybody knows, maybe betaflight with the proposed software version does not support MAVLink output at all?
See: Telemetry | Betaflight
You might want to turn MSP off for UART5 and set telemetry baud from AUTO to 57600.
Also re-try first cable-based, e.g. hook up FTDI cable to your flight controller and make sure, the communication works first cable based, before you attach AU+GU HM30 RF link in-between.
Thank You for the answer!
You are correct: betaflight do not enable telemetry output (at least in the disarmed state) if port is shared; but MSP worked fine, so it was enabled solely.
Disabling MSP allows me to see Telemetry both in MissionPlanner as well as to get it through the SIYI to the SIYI android app (running under windows through android emulator).
One more question regarding SIYI air module:
my air module and copter are powered from the same battery. I found that there is several hundreds milivolts voltage difference between battery GND terminal and air module GND terminal; but there are no noticeable voltage difference between battery GND and FC GND. If I connect the ground wire from the telemetry port, it draws a current of several hundreds miliamps (the copter is not flying, so its overall consumption is about one or two amps).
Do I have to connect the ground wire (black) from the air unit to the FC? The wire is small, the circulating current of several hundreds of miliamps can be not wanted in there… From other side, stability of the data bus also is important ?
P.S. I’m using S4 battery, so not BEC is provided for the air unit.
Significant current flowing over GND wire between the air unit and the flight controller is not good - this connection should only be for data connectivity and there should flow max. very few milliamperes, if even this.
Which air module port GND pin are you talking about? Link port GND pin?
If you measure, in a powered down state, the resistance between the air module power input negative pole (thicker black wire) and link port GND pin, what value in Ohms are you seeing?
Does your flight controller have a power module for current measurement? If so, do you know if the measurement shunt is on the positive or negative supply rail?
Hi everyone,
I’m trying to get an image with the lan cable I connected to the HM30. I made all the ip settings. As soon as I press the play button via EasyPlayer with RTSP, airunit disconnects the connection. I am leaving a video link to help:
By the way, the HM30 has a green light that flashes 3 times when the connection is established. What is the solution for this? Why does it happen this way? I couldn’t find anything in the manual for the green light.
HM30 Firmware: 0.1.9
AirUnit Firmware: 5.2.8
Hi All,
I have bunch of Hm30, I am getting telemetry in mission planner and video on VLC media player.
My OS is windows 10
Is there any way to get video in mission planner ?
Via ethernet or any other means ?
Video streaming to Mission Planner works, e.g. via Ethernet. See: 30KM 1080p 60fps 150ms - SIYI HM30 Full HD Digital Video Link Telemetry Radio System - #990 by mike_E
Thanks for your reply, I have read his post already, not much clear instruction, @mike_E @SIYI can. Spread some light on this issue.
Good day!
The problem associated with the current over GND pin of the telemetry port doe not occur anymore. I suppose that I have seen capacitor charging rush current of something was bad with contacts in my wiring. I Did several tests and problem does not repeats.
Playing with the HM30, I found several problems.
Hello
I`m trying to run MAVLink OSD using betaflight, but with no success. May I ask you for the hardware connection and firmware settings of your system?
Hi
I have tried this not getting more than 5 km range in any of the modes
Using 4s battery for tx and rx
What can possible be wrong ??
Приветствую Дмитрий.
In my case the MAVLink telemetry is on UART5, initially was set to 57600 speed, now is on AUTO and still is working. Note that MAVLINK can’t share the port on betaflight, so MSP on this port must be disabled.

Aocoda-RC F405 V2 , Betaflight / STM32F405 (S405) 4.3.2 Nov 28 2022 / 07:26:30 (60c9521) MSP API: 1.4
SIYI HM30 sw.version 0.1.7, OSD set to MAVLINK, all outputs to 57600, UDP stream.
MAVLink OSD works on FPV Android APP, but I can’t access the MAVLink stream in QGC both on Windows and Android versions (MissionPlanner works Ok).
Wiring is typical: RC: T5 and R5 to the RX and TX pins of the telemetry port of the air unit respectively.
Would you mind refering to the latest user manual and let’s do some trouble shootings together, please?
https://siyi.biz/en/index.php?id=downloads1&asd=192
Hello
Thank you for the reply! I do completely the same things, but it doesn`t work anyway. Here is photos of my setup HM30 - Google Drive. Maybe, I miss something important…
My HM30 sw version is 0.1.7
All outputs of my HM30 are set to 57600. Previously, the betaflight output also was set to 57600. I can see MAVLink statistics on the HM30 screen.
(Just for the reference: I’m using UDP stream over ETHERNET).
Also, I heard (but did not checked) that not all UARTs are suitable for the telemetry on F405 like FCs. To make sure that my port is sending exactly MAVLink data, I had attached regular 433 MHz telemetry wireless transceiver (FTDI converter also is ok) and connected with the MissionPlanner (note that the betaflight MAVLink stream is unidirectional)


{kind=link}