Connected everything and i have set all the outputs to channel 11 but no servo is moving do i need to power Pixhauk from power source ?
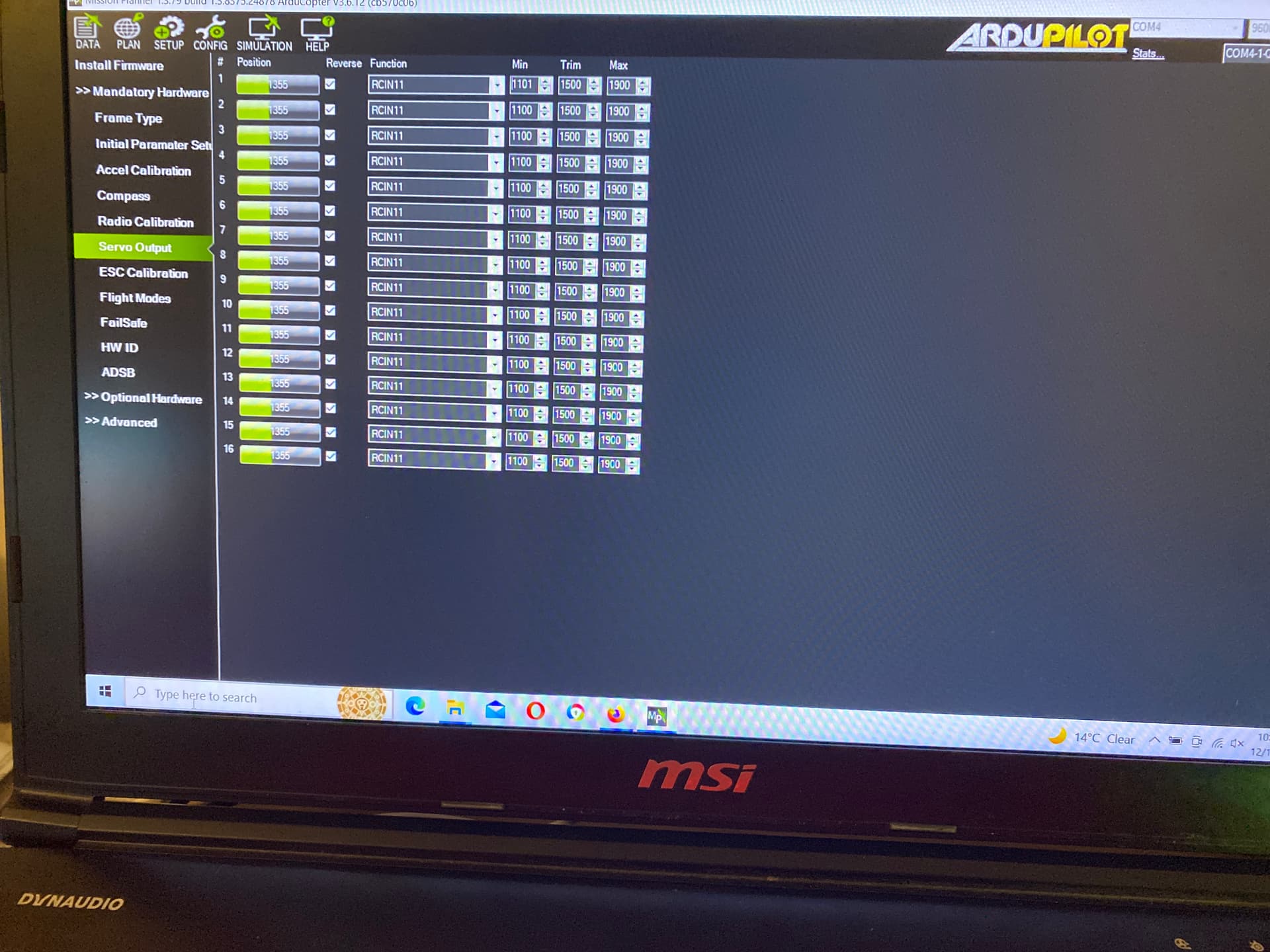

You need external BEC on the servo power rail - Pixhawk is not powering the servos, see here: Servo — Copter documentation
As I wrote, this has nothing to do with HM30 anymore - and I suggest you go to Pixhawk thread with further questions/issues with Pixhawk.
1 Like
Does anyone have an answere for me? Please ! I see no where in the manual where it says not to power up the air unit withought the antennas attached. I am wondering if i damaged my system by doing this. The air unit still works fine. I got an answere of “of course” but does someone have a better answere or some context?
Thanks risto everything is sorted now i am trying now to connect my fly dream ATT to the system i saw the manuals but they confusing ,how can i connect the tracker ATT to the SIYI HM30 ?

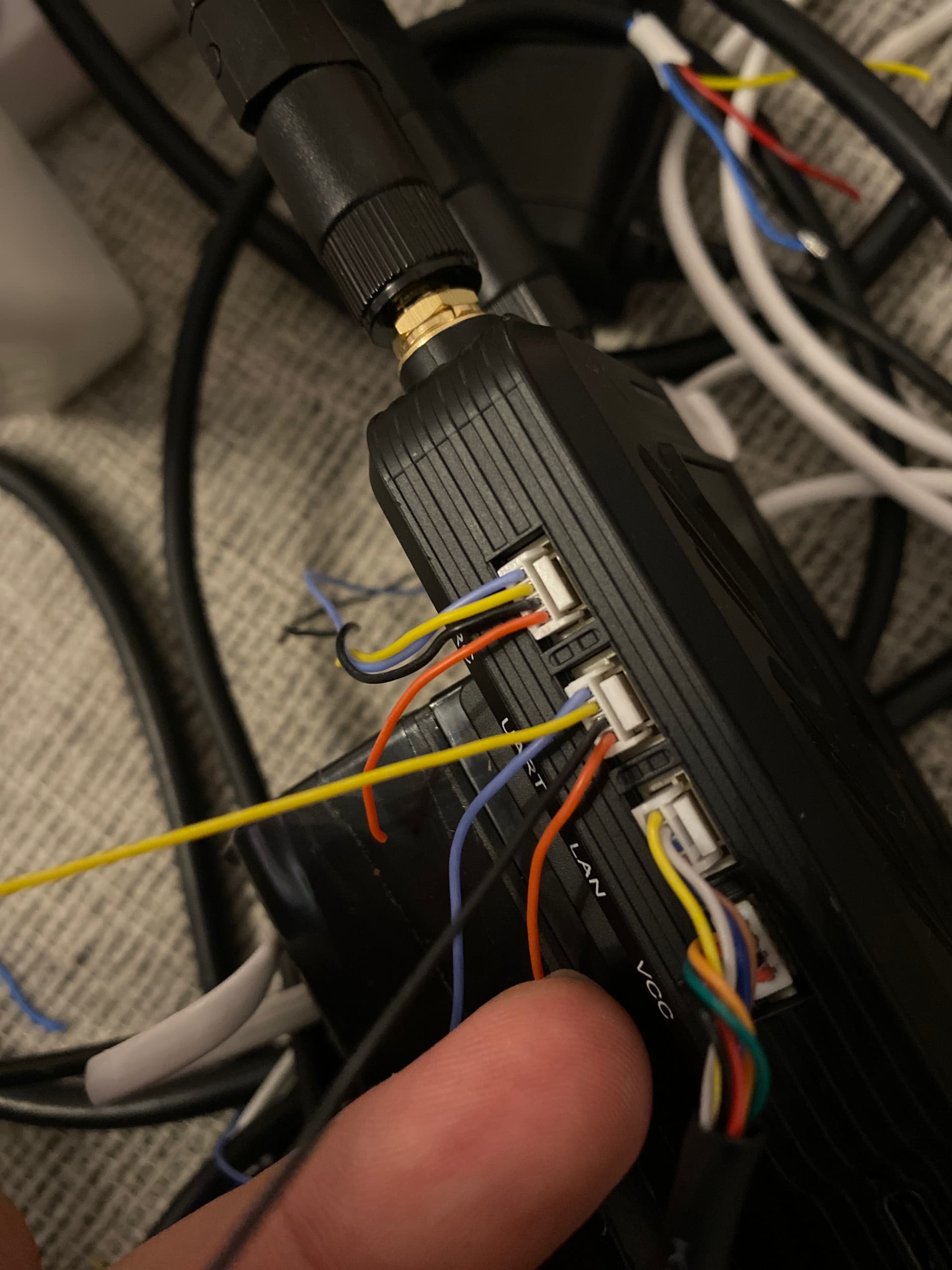
You connect the antenna tracker to the UART port of HM30 ground unit:
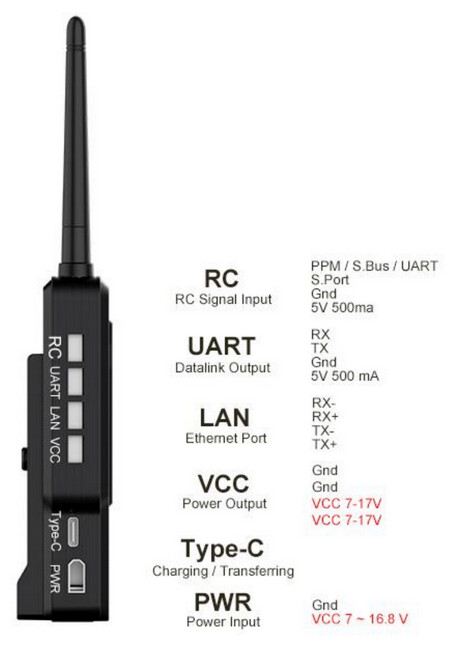
Typically you need to hook up only GND and TX line from HM30 GU to RX line of AAT. As the left connector is used for AAT’s own GPS usually, use the right port pin 1 for MAVLink RX:
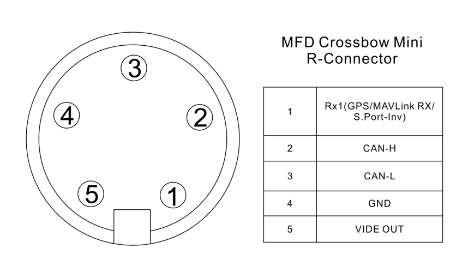
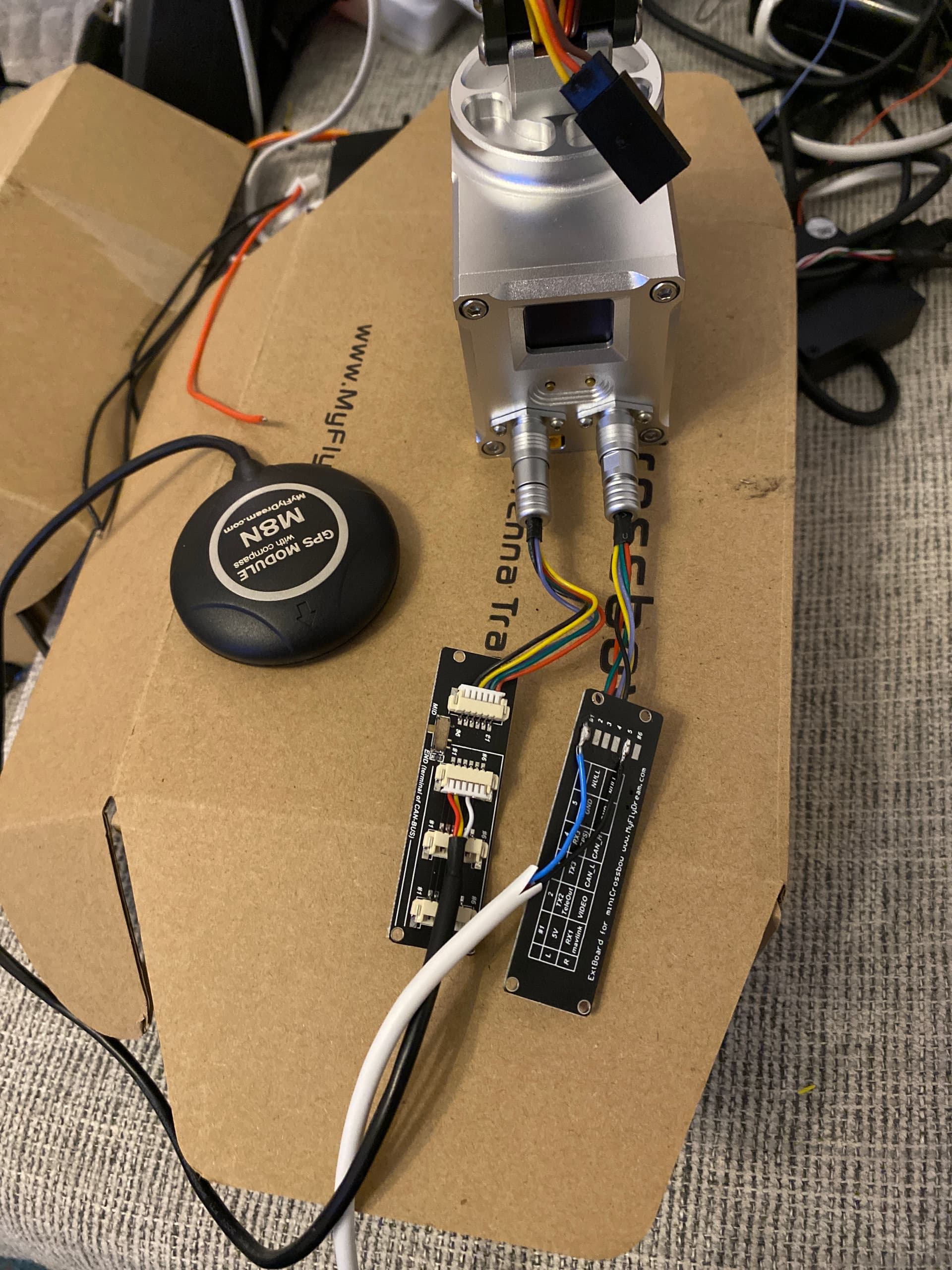
Mini Crossbow AAT requires 12V to 16V (3S~4S) DC power in addition via the XT30 connector. Here the manual: http://myflydream.com/inc/lib/download/download.php?DId=64
As a general rule you should never power up a radio device with out at least one antenna connected. In every radio device manual I have read it says do not power device without a antenna
1 Like
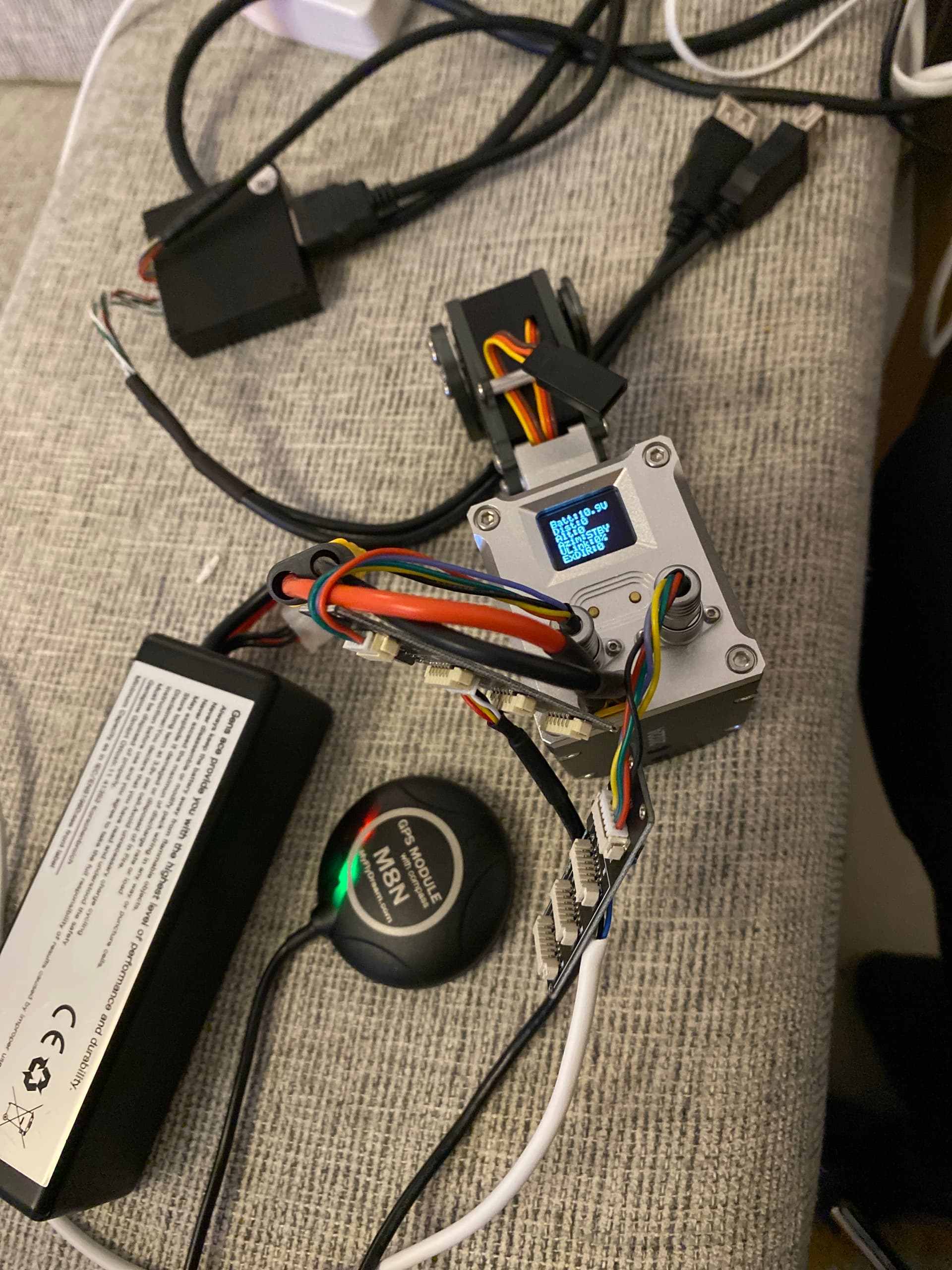
Here is my comms setup works well, very happy with the HM30 and the mini crossbow AAT.
I am using the RFD900 TXMOD for AAT telem and RC via frsky receiver X8R for my radio. Or you could do the same thing with the HM30 just need a mavlink to S Port converter. This way i get RC control and telem (yappu) on my radio no wires. The HM 30 has the external wifi dongle for the lan connection. totally wireless including power. If you want you could skip the external wifi and connect a long RJ45 cable no longer totally wireless but you could use a 5 to 10 meter cable latency is much better with the cable.

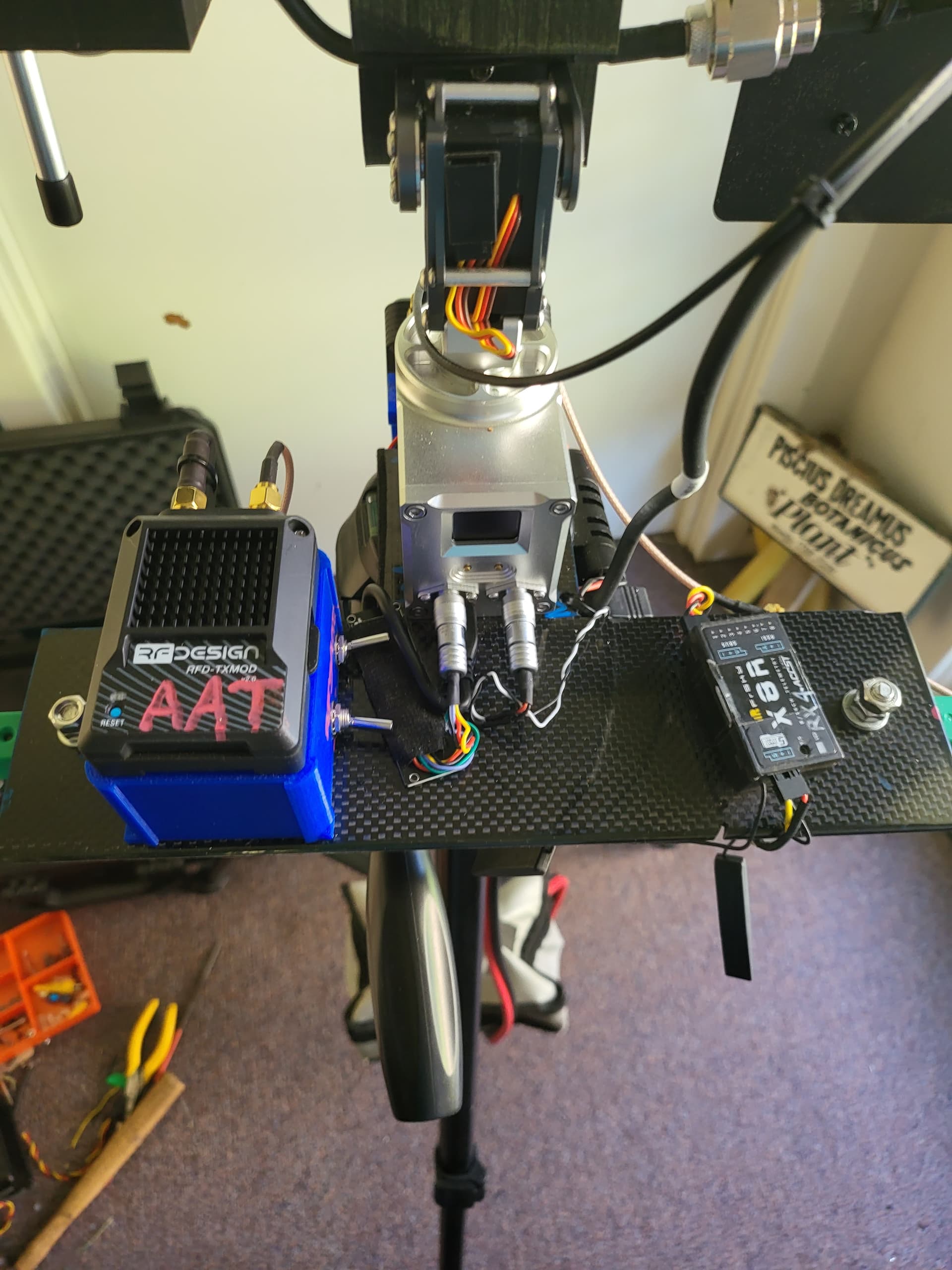

note had to change the 2.4 ghz wifi channel on the txmod so as not to be on the same channel as the HM30 external WIFI
3 Likes
Very nice setup i will try to set it up Today any 3D files form the hm30 ?
Can i ask you how do i connect the MFD TeleFlyTiny Tracking module on pixhawk ?
Here something that I did to create a mount for HM30, maybe this helps you further:
HM30_GU.stl (753.8 KB)


Well …i think im done boys. I no longer have 5volt out on the ground unit rc or uart port…was working fine. Maybe i screwed it up but it just stopped working with the frsky xm+. The refund issue with the first hdmi convertor is still not solved and its been over a month even after sending the old unit in. Me plugging in the air unit with no antennas is now the last straw…air unit works but did i damage it? No one knows so im gonna assume i did. I have the a8 on order but now im gonna have to cancel it as well because im too stupid to get this system working and im broke now lol…been fun boys i gave it a good shot but its back to the old 1.3 analog and dragonink rx for long range…darn i was so excited i sold my dji system for this.
Please dont take this as being a negative on this product i have had good support for the most part from the siyi store . I see it works well for most people and i had high hopes but i guess its all operator error and i need something more plug and play.
I wonder if you need this TeleFlyTiny with HM30 at all, as you have full MAVLink connectivity via Pixhawk telemetry port over HM30 unit to the AAT already natively. Doesn’t the TeleFlyTiny modulate MAVLink on top of analog video? As for 1 - you do not have analog video with HM30 and 2 - you have native MAVLink link already with HM30. What you probably do need is a GPS for the AAT though, that I do not see in your images.
All concerns are responded through personal chat
I’ve not made it off the ground yet, but it’s all moving forward so far.
While I do have the mini-crossbow AAT & GPS I’ve not tested the setup yet. I thought that the HM30 ground unit acted as the “home” location once connected together.
I fly Pixhawk as well pushing Mavlink…
I understand you to say that I do need to connect the GPS to the ATT, is that correct?
I do not have the TeleFlyTiny unit…
The model has a GPS and transmits it’s coordinates with a specific refresh rate back as telemetry data. For the active antenna tracker (AAT) to know where to aim the antenna, it needs to:
- know the position of the craft (provided via telemetry)
- know it’s own position (provided by AAT GPS)
- to know the orientation of the AAT (provided by the compass, embedded in MyFlyDream miniCrossbow AAT), whereas it is assumed that AAT is vertically aligned to the Earth. The latter is most often achieved with spirit levels on the base of a tripod, where the AAT is mounted on.
TeleFlyTiny is not required with HM30, it is only needed if there is no GPS telemetry back-link from the craft to the ground station and also an analog video link is used.
And according to the manual page 7:
Once the distance between the plane and the tracker reaches 10 meters, the tracker starts to
track.
Hello everything set what do i need to do to test the auto tracking do i have to setup anything on ATT ?

There are some options you can set and you can fine-tune the tracker alignment with trim functions, if needed. Best you have a read at the MyFlyDream miniCrossbow AAT manual: http://myflydream.com/inc/lib/download/download.php?DId=64
But we are again drifting away from HM30, the topic of this thread…