Do you have ESC telemetry available? On Arducopter current Stable this is the best reference for the notch filter. If you don’t throttle reference must be used. Unless you run AC4.1-dev then you may be able to use FFT tracking. I say 'may" because I’m not sure if FFT is feature limited out of the F405 or not.
Hi Dave, the ESC I use is a 4 in 1 HAKRC 15A Blheli_S BB2. I don’t know about the telemetry. Just building a small quad for fun. In the EU we will soon have new UAV rules. A drone of maximum 250 grams (all in) is considered a toy and it doesn’t need to be registered and I don’t need a piloting license for it. That is why I want to keep it simple and light.
I still want to add an optical flow sensor Cheerson CX-OF (ordered) for the Flowhold mode.
In INAV I used the Matek optical flow sensor + LIDAR. I found this a bit useless given the short effective range of the LIDAR. Arducopter seems to offer more sophisticated features but it is tougher to set up.
I did a very short indoor test flight. There is not enough space to do the autotuning. I add the log file for info. Maybe this contains hints about the notch filter.
Hi Walter-No ESC telemetry with BLHeli_S only BLHeli_32. But that’s OK, there are other options. For the log to be useful for notch filter parameters you have to set the INS_LOG_BAT_MASK to 1. Then make another short hover flight ~30 seconds if you can, and post that log. Chances are it will be too large to attache here, you will need a cloud service and post the link. Then we can review.
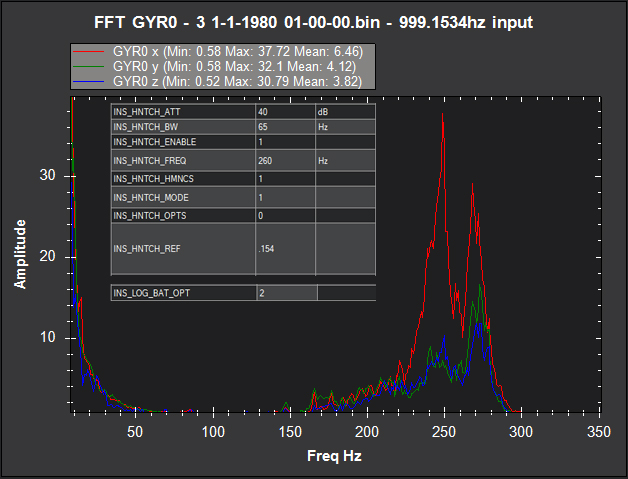
OK Dave, the weather is better today, so I changed the parameter and did a few short hovers. Here is the log file. I hope it is useful. Best regards.3 1-1-1980 01-00-00.bin (828.5 KB)
OK, cool. So you can try the Dynamic Notch parameter settings shown embedded here in your FFT graph and make another hover flight and post that log. The change in log parameter will now log post filter data which will show how effective the filter is and confirm the settings are good or need more work.
In my thread dealing with an almost identical quad Andy told me yesterday to set FREQ to 80 and BW to 40, without even looking at the FFT graph before, since the frequency will be scaled by the code. The docs are apparently a little outdated when it comes to ESC telemetry.
In any case, the notch filter tuning had no effect on oscillations/vibrations for me so far.
Different animal. Current Stable AC, which Walter is running, doesn’t have FFT tracking. I mention this in a post above. If he wants to use -dev version then I would have suggested FFT reference. I run -dev on several craft but personal choice as I’m OK with these as Test Mules.
Ah I see, I had overlooked that. I found out that new features tend to arrive in the dev version just in time when I need them, so I’ll be sticking with it too.
Hello Dave,
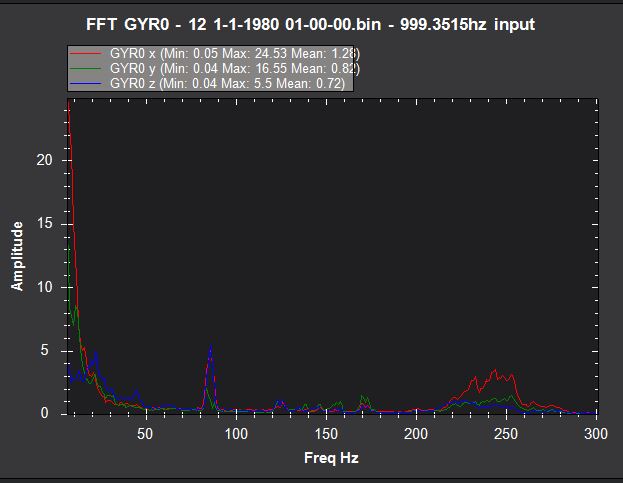
I entered the values that you suggested. For INS_HNTCH_ATT , the maximum allowed value on my quad is 30, so I entered 30.
The drone flies quite well. Just, in altitude hold mode, the altitude is sometimes a bit erratic. It happens that the thrust decreases a lot. When I rise the throttle, it ascends a bit fast. But once stabilised it holds well.
I add another log file. 12 1-1-1980 01-00-00.bin (828 KB)
Sure. I designed and 3d printed this frame. I used PLA. I also printed another one in ABS (under construction) which is lighter and stronger. I’ll mount a GPS on that one.
The tower contains the magnetometer and, in an alternative version, it will hold the GPS/magnetometer. The antennas look strange because I lost the original ones in crashes and trees, so I made my own.
With a 3S 1000 mAh battery it weighs just a bit over 240 grams.
As for vibrations: Certainly it has to do with Dave’s calibration magic. I think that the propellers also matter a lot. These are from Lumenier. Their finish seems finer than cheaper ones.
Thanks. Your motors are probably also a better choice. Mine are 1106 4500kV and have to work really hard to lift the quad. It was originally planned as 2S but I quickly realized that way I would never be able to put all the stuff on it that I wanted. (I originally planned this 2 years ago when I knew much less about quad building.) The 4500kV are the only ones of this series of motors that also support 3S - but just barely I guess…
The notch filter is working great, you are done with that. Now on to tuning as that needs help which is to be expected. Hopefully Autotune will get it close. Regarding altitude instability, do you have the barometer covered with foam? Pretty much required.
Note: increase the INS_HNTCH_ATT to 40 and ignore the out of range nanny warning.
This is great, Dave!
I overrode the warning for the INS_HNTCH_ATT value.
Is this filter analyzer part of Mission Planner?
As soon as we have a day with light winds I’ll take the drone to a spot where I have plenty of room to activate Autotune.
And yes, the barometer is behind a slice of sponge.
Many thanks for your help in making my quad fly nicely!!!
I think that your motors should be able to do the job with a 3S battery. I have no idea what the weight of your quad is, but your motors save over 20 grams compared to mine.
Hopefully you get your drone to fly well. All the best!
Hi Walter- Yes, the FFT graphing is part of Mission Planner. From the Setup>Optional Hardware>FFT Setup menu there is a button “FFT”. Press this and the graphing window will open. Then select the “New DF log” button and enter the log file you want to analyze in the file open pop up. There are some Windowing and Cursor tools you can use in the graph panes to zoom in and spot frequency events.
And BTW-I built a 3" quad shortly after Arducopter was first ported to the Omnibus F4 Nano and worked thru many early issues getting it to fly. Lot’s of crashing along the way. This was before there was batch logging available on these SD cardless wonders. Much, much better tools today
Thanks for the graphing info.
About the Althold problem: I think that is only occurs a few seconds after liftoff. Once corrected, it holds altitude nicely. At first the quad drops, I increase throttle to counter-act and then it holds altitude, it doesn’t shoot up then. Therefore I think that it starts in Stabilize and that Althold is activated only a bit later. I switch it to Althold before arming.
Post a flight log of this. I’m not really following this " it starts in Stabilize and that Althold is activated only a bit later". There is some tuning you can do with the Altitude Hold Controller.
Ah OK, this sounds normal. It won’t really lift off in an AltHold mode until ~ mid throttle. But where mid throttle is depends on whether it’s been “learned” or not. I always lift off in Stabilize and then switch to another mode once it’s off the ground.