Just flashed it, messages as follows…
Initialising APM
Check BRD_TYPE: Baro: unable to initialise driver
Frame: UNKNOWN
KakuteF7 0039001D 34365107 31393931
ChibiOS: 57801550
ArduCopter V3.7-dev (d94663d5)
Just flashed it, messages as follows…
Initialising APM
Check BRD_TYPE: Baro: unable to initialise driver
Frame: UNKNOWN
KakuteF7 0039001D 34365107 31393931
ChibiOS: 57801550
ArduCopter V3.7-dev (d94663d5)
one important advice - after you will solder SDA SCL leads for compass - be extra careful and put a layer of epoxy above those solder points. they are fragile and can come up from board if you pull on them.
Thank you, I was wondering about some of the pads. At the moment I’m directly soldered, but was considering using e.g. 1mm gold bullets so at least something else had some give. Good idea with the epoxy
Was wondering about the easiest way to query the board and see what it tells me the baro is - can it be done from Betaflight?
i am confused.
i just pulled the .apj file from ‘latest’ folder and flashed it into my model with F7 AIO. RC12 one did not spin 2 motors - but latest one worked flawlessly.
on a big model i soldered in golden pins to all AIO pads. on small 200mm model it is all direct solder.
i am very puzzled indeed with the baro dilemma you got. i looked for a picture of the AIO belly - but i have none, and cannot lift it up from the model to check.
pls make a snapshot and post it here so i could at least visually confirm if your baro and layout looks like mine.
finished motor test
Initialising APM
starting motor test
PreArm: Throttle below Failsafe
EKF3 IMU0 tilt alignment complete
EKF3 IMU0 initial yaw alignment complete
EKF3 IMU0 initialised
EKF3 IMU0 buffers, IMU=19 , OBS=7 , dt=0.0120
Initialising APM
Barometer calibration complete
Calibrating barometer
PreArm: Battery 1 low voltage failsafe
PreArm: Battery 1 low voltage failsafe
PreArm: Throttle below Failsafe
Frame: QUAD
KakuteF7 00410023 34345117 39383339
ChibiOS: 57801550
ArduCopter V3.7-dev (d94663d5)
just to be positively sure - does your latest printout say same number as that one above?
Yes, exactly the same
Initialising APM
Check BRD_TYPE: Baro: unable to initialise driver
Frame: UNKNOWN
KakuteF7 0039001D 34365107 31393931
ChibiOS: 57801550
ArduCopter V3.7-dev (d94663d5)
I’ll disassemble my quad so I can look underneath the board and post back
Just had a thought, remembered both Mag & Baro use I2C, so I’ve just disconnected the Mag and it now boots…
PreArm: Logging failed
PreArm: Compass not healthy
PreArm: 3D Accel calibration needed
PreArm: Throttle below Failsafe
PreArm: check firmware or FRAME_CLASS
Frame: UNKNOWN
KakuteF7 0039001D 34365107 31393931
ChibiOS: 57801550
ArduCopter V3.7-dev (d94663d5)
EKF2 IMU0 tilt alignment complete
Any idea how to fix the mag issue? Bearing in mind it worked perfectly under BF.
Dear fellow, you can refer to my look. I can do these jobs.
My guess is you shorted i2c bus or reversed scl and sda wires. Also, if i2c wires are too long it may produce same problem. Baro and mag are on a same bus. But if it worked on a betaflight somehow on same wires - it is very peculiar.
Paul, thanks for your help, and sorry for the wild goose chase.
I’ve now pinned it down, having flashed it back to BF which is a bit more forgiving, I discovered that Baro is messed up when Mag was connected, but not externally powered.
Re-flashed your latest version, powered up the board externally, plugged in USB, and it all works well.
My GPS 5V is taken from the board pad that’s near the SCL/SDA pads - do you know if it’s better taken from elsewhere, so it can be usb powered as well as battery powered.
yes, i would say power up gps rom the 5v pin that is right in between the 3V3 and T6 pins.
that is the only one 5V that feeds from an internal power - do not load too much on it. all other 5V sources come from different BEC and all else needs to go to those other 5V sources, may be except of a R-XSR radio receiver - it is how i power my model, so when i connect usb cord my compass/gps and radio is powered as well.
all else would feed from other 5V pins.
also, i would highly recommend u to get esp8266 board - it is very simple to do with kakute as you have 3v3 pin on board to power esp8266 from. this way you will have wi-fi telemetry to use with qgroundcontrol or any other software on your phone or pc.
Brilliant, thanks, I’ll set it up that way.
I’ve got an ESP8266 kicking around, may well give that a shot
Thanks for your help
ok, good luck. get firware to flash esp8266 from wiki page, and use this picture to flash it: 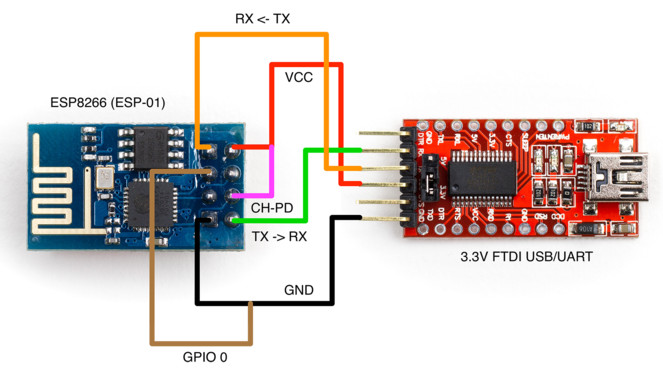
flash it with esptool-2.3.1 software, it is very easy.
Thanks, looking at that I might get an ESP-01 as it’s smaller than my current one, it’s an ESP12 on a bigger board running arduino, and I might end up using it again as a data logger at some point
I like esp-01. Range is not very long - it has 50-60m max, but it is usually enouth. Just make sure antenna part protrudes past carbon fiber.
Also, 3v has to go to both pins as on picture always, otherwise board does not start. It is not in wiki and is sometimes missed.
Gpio0 to ground is only done for flashing.
Check BRD_TYPE: Baro: unable to initialise driver
I was also getting this error during my setup of the Kakute F7 (non AIO) flight controller.
My GPS/Compass is powered from the GND and 5v that are close to the SDA/SCL pads where the external compass is connected. The GPS is connected to UART4. What I noticed in order to avoid this error is to first connect the battery and then connect the USB cable to the PC. Connecting the USB first will persistantly give this error even if you connect the battery after connecting the USB cable.
power gps from the 5V that is next to 3.3V pin. that one powers up from BEC that feeds from USB power.
other external devices can power up from other 5V pins - those ones will power up from battery.
Looks like this AIO controller, when powered through USB, does not provide power to any external devices. It is possible that barometer is also powered from same 5V source as external devices: from 5V regulator. So you have to connect the battery.
It cannot be. 5v pin on uart side, next to 3v pin is for sure powered from usb on all 3 aio boards i used.