Yes ATC_THR_MIX_MAX is already at 0.5, but I’m specifying to update ATC_THR_MIX_MAN, which is normal now that you have vibrations under control.
1 Like
Hi,
I just read trough a bit of you post and your results are very interesting!
You managed to resolve the vibe issue with great success!
It would be really interesting to learn a bit from what you’ve done here!
If you’re able to, it would be really cool to get some pictures of before and after and to know what you’ve done to achieve this!
Hi
So first of all thanks to @dkemxr @xfacta @amilcarlucas they have been advising me different methods to get the vibes low before i go to next step and I had almost reached a dead end beucsse we had tried everything.
Finally in one flight with extra dead weight on FC cube orange we saw the z vibes below 4units but x kept increasing to reach almost 60 and drone was shaking quiet prominently and that was the time we noticed our 2 battery’s (6kgs each ) had a up and down motion. On seeing that post landing we changed the complete bedding of our battery base from using 3mm CF tube attached to frame to 8mm CF tubes. And that was the magic , as mentioned by devs in multiple post regarding flexible frame the FC hates any flexible mounts or base or arms.
I will try to get the before and after photos and share the same here.
Regards
So I am reading about ATC_THR_MIX_MAN and as per my understanding I have to increase the value from 0.5 slowly to almost 0,9
Am I correct ? Attitude has to be given more preference rather than throttle
Not necessary, 0.5 will be fine for your copter.
Usually only very small copters go for higher values.
ATC_THR_MIX_MAX can also be increased in some cases, but I would leave them at 0.5 unless you are trying to solve a specific issue.
Possibly revisit them after tuning is completed and attitude control is very good.
Okay understood . Will change the arc-thr-mix-man0.1 to 0.5
Do you feel we should do a auto tune with 1.0 aggression ?
How does our current pids look . Des roll and act roll and pitch are looking good to me…
Also the prams I mentioned above that we are making changes should I proceed with them and do a flight ?
So we have two fans
One for cooling and on the the siyi mk32 receiver.
I flew with different config if you could have a look regarding the 17hz frequency. I am not able to read the pre and post filter log ( not able to figure out how to view it ) if you could share a link or video on how can read up and understand about this
Log - Rx Fan Off , 4kg rx fan off 1st log.bin - Google Drive
Log- RX + Cooling Fan off max payload (14kg) 14kg both fan off.bin - Google Drive
Log- Rx fan off with max (14kg) payload - 14kg rx fan off.bin - Google Drive
So today we did a flight without any dead payload since the vibes have come to good units. And post landing we checked the Mot-thst-hover and the value was 0.125
Do you now suggest that we can fly without the deadpayload ?
We did a auto mission today with max payload 14kgs (4kg deadpayload inclusive )
The auto mission went great and we landed at 48v since it’s a big bird and didn’t want to take risk in finding out max endurance also had set RTL at 3.4*14=47.6v to be on super safe side ( we were nervous )
Could you have a look at the flight , the vibes are perfect below 5units in mean value and peak is about 12 units. Winds were quiet strong but still she flew amazing.
Can you have a look at the log and check if there is anything else I should watch out for or .
Is she ready to do auto missions to drop the payload ? Or do I have to work on my PIDs
Did you scale the max accels according to the payload as described in the wiki?
Yes, ask per wiki calculations
Very good ![]() that’s the way to go.
that’s the way to go.
@amilcarlucas
Could you have a look at this log when you get time and see if things are going good. ?
Unless you have specifically configured GPS_AUTO_SWITCH=1(use best) I would set this to 4(use primary if 3D fix or better).
This stops the AP from switching randomly between both GPS when not really required.
1 Like
Really appreciate it.
Both the without-4kg and with-14kg log look pretty good. The 14kg log looks very good with good attitude tracking. Maybe the without-4kg PIDs could do with a small tweak…not sure.
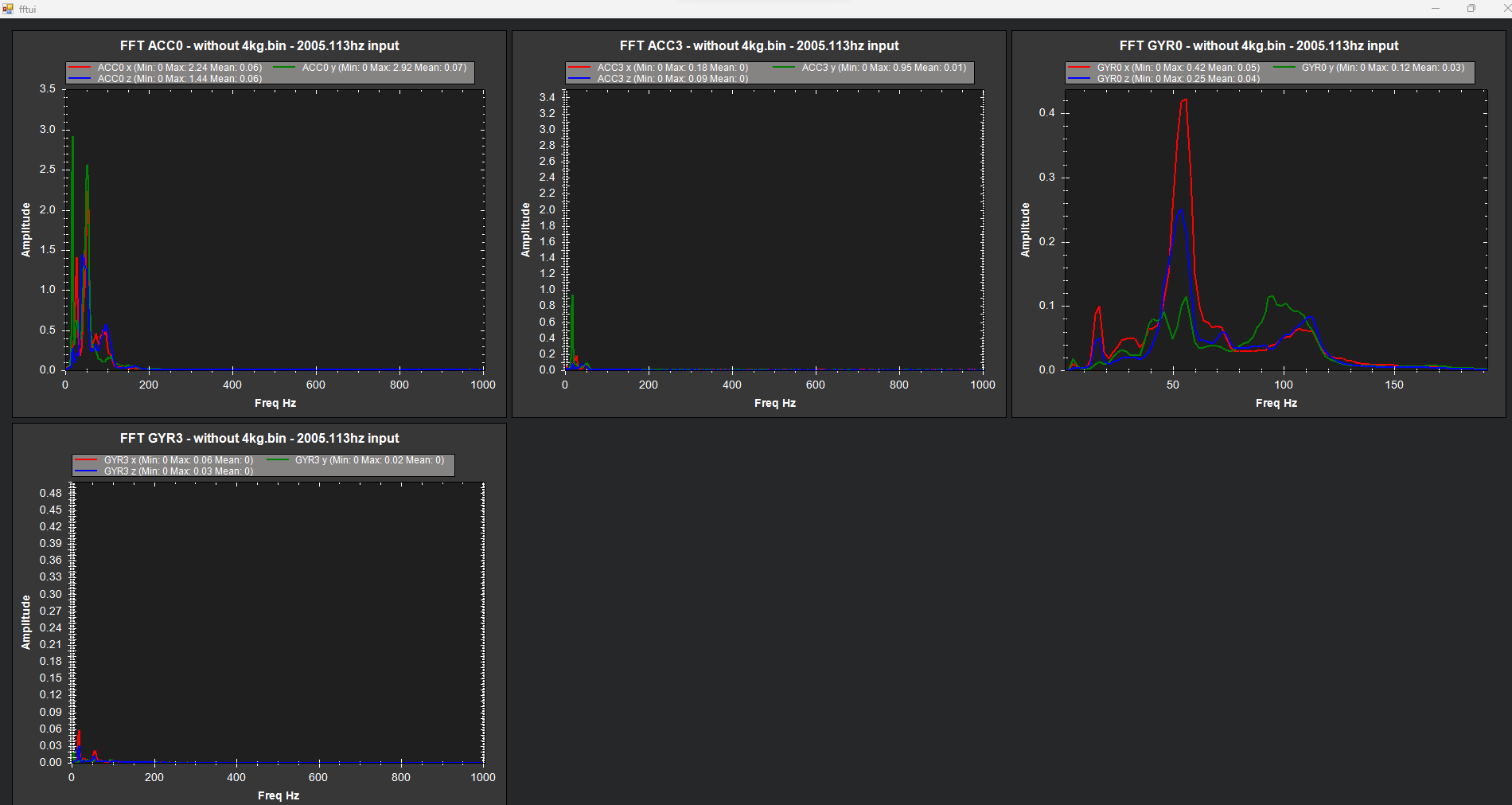
Perhaps the HNTCH setting could be improved but it isn’t bad either. There are a few peaks (around 32hz, 65hz and 119hz) that you can see in Gyro0. In addition there is the 17hz bump that Shaun mentioned - maybe this can be supressed with an additional static notch.
Anyway, overall it looks good and I guess that’s how it looked when you were flying.
@Clogz did you mean this log for 14kgs flight.
Yes she was flying beautifully
Really appreciate your inputs
I will read up more and notch filter and hopefully @xfacta can have a look at it too and would advise the settings I need to change. I have seen lots of videos and data on notch filter settings but that’s one thing I am learning slow and not able to understand the concept.
Would appreciate if anyone can share a reading materiel for the same
Yes, log-14kgs max flight.bin is one of 2 logs I looked at.
The other one was Log - without 4kg.bin.
1 Like
The flight without 4kg payload requires an autotune for sure because we have done autotune only when this 4kgs is as set as dead weight.
How does mot-thst-hover look like, beucsse I was advised to use some dead weight because of mot-thst-hover being lower than 0.12
If you autotuned with 4kg dummy payload and it flies well, then do NOT run autotune again.
If the copter is unstable without a payload then just fly it with the real payload or the dummy payload. It’s a bit too overpowered to fly without some payload.
1 Like