Hi
So changed the prams as you mentioned and problem still remains with the Z vibes which won’t come below 20 units but the mean value is below 15 units.
We have tried everything for z vibes, is it natural to have high z vibes in big quads ?
Also we did a auto mission today auto take off 3 way points and rtl. We noticed ekf lane switch and other errors attaching the log below any reason for this ekf lane switch ?
Can we proceed with mean vibes less than 20units?
Also is there any motor twisty or something like that that would be getting out vibes higher. Hover there is literally vibes less than 10 units but at 10m/sec forward or backward and once we release the stick the vibes bonce above 30 units
So these props came along with the x11plus hobby wing motors. Will try to find different prop but the carbon fibre props for this size will be quiet expensive
Ok right now we are working on balancing prop … let’s hope after that vibes reduces because we played around with FC a lot … so let’s hope thanks for the input will share a log tom with /if changes in prop balance
Hi
So prop balance was checked and they are fine. Motor arms are fine no twist everything Centred.
We put some dead weight on top of cube orange (literally on the orange cube ) coins were used as dead weight
Results -
with 3 coins z vibes are below 20 , but x at 50
With 1 coin z vibes are high and x also
With no dead weight z is 50 and x is low
Why has the x vibes increased by putting deadweight but at the same time it’s helping reduce z vibes significantly. The pixhawk is mounted on a anti vibration 3d plate and 3m tape below.
Is bad pid the reason for x vibes ? Or dead weight is the issue beucsse If it’s dead weight then what’s the way around to reduce z vibes
The vibrations and what we see logged under Vibe is physical. The data comes direct from the accelerometers.
It’s possible that some tuning parameters could have an affect visible in Vibe data, but that’s just an indication of vibrations being an issue in the first place.
Harmonic notch filters and other related settings dont directly increase or decrease those Vibe readings - the filters are software based and attempt to filter that noise from having a detrimental effect on control loops.
So there are plenty of software mechanisms already working to keep those vibrations from affecting flight, but there is only so much that can be done without more work on the real/physical vibrations.
This antivibration mount has proven effective for the Cube with standard carrier on large copters:
Thanks for the info the sharing the product . We have changed our battery bed because we noticed some flex today when we had put dead weight on cube orange and z vibes were under 20 and x again jumped to about 50 at that very moment we noticed our batteries 6 kgs each (2 battery) had some up-down motion on the battery tray. We are strengthening the battery base which is attached to the frame .
Will be doing a test flight tom in about 16 hrs from now will post a log with new battery tray hopefully that will solve our issue I feel . Thanks for your inputs it has really helped us to reach this place . Once / if the vibes are in control will share the log and then will take advise for the next steps . Right now we are just concentrating on reducing the vibes to below 20 in x y and z axis
Thanks to you and all your inputs and information regarding how to get the vibes under control.
We made multiple changes for FC and removed any flex that was in the drone.
Finally reached a good configuration with slight amount of dead weight on cube orange and stronger battery bay. Our vibes in this configuration has given very good results. There after we did a autotune since mean vibes were below 8units in all 3 axis.
I am attaching a log post autotune. The vibes mean is below 8units and even the max is below 20units please have a look at this, and advise me what next steps should I proceed to ( as per reading I understand I will have to get good pids.
I can’t thank you 3 enough to get e to get these results .
So I will have to read about the atc thr mix max setting currently it’s at default 0.5 do you suggest any unit.
Yes we do have a fan cooling device behind where all the power module and bec are setup and also on above the receiver (siyi mk32 ) but receiver is also setup on a anti vibration mount.
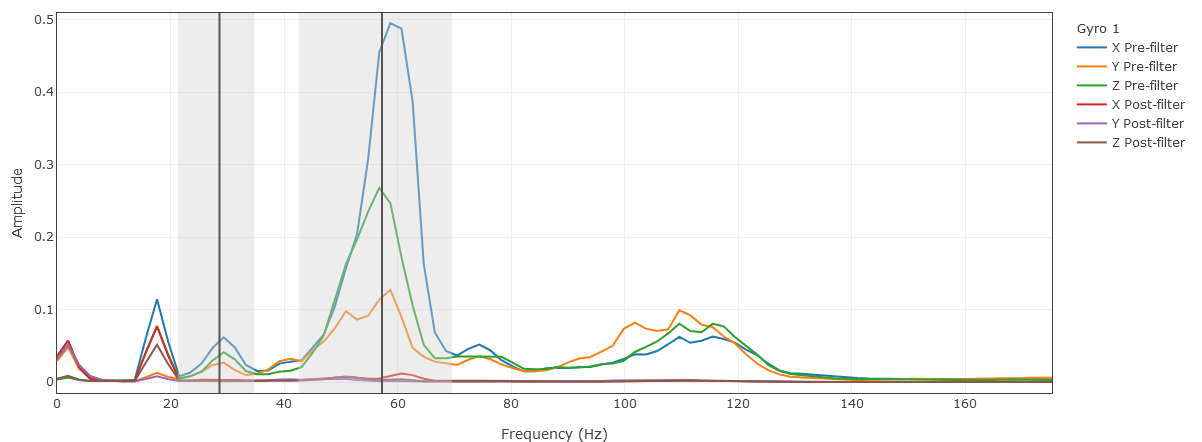
I can switch of both of them one by one to present to you in a diffeeent log and then we can see the 17.6hz frequency.
So after 12 hours we will do a flight with standard dead weight payload of 4kgs and there after one flight with max payload and make logs and share with you.
How do you feel our current pids are like do you feel we will needs to do more changes to our pids ??