I lokked at log 3, I think vibrations were a bit better, there is certainly no clipping.
Filter seemed to be doing it’s job.
Attitude control is still shaky at the neutral/hover position.
Ok so log 3 vibrations are acceptable ?
Also how to get attitude control issue sorted ?
Shall we go ahead with auto tune ?
Right now we are doing flights in loiter mode so creating log that can be assessed by you
Hi
So we did a flight winds were strong attaching the log
Z vibes haven’t come now and a slight component of x and y vibes also visible.
Right now we are changing the base plate of pixhawk and will post a log of that after 6 hours
https://drive.google.com/drive/folders/1SUk44PDyknGvhpYkM_GXO6P6sD2xnis0?usp=sharing
Hey Shawn
So we did a flight in evening also under strong wind. Good news is the z vibes in The last flight has come down drastically thanks to the new FC bed on softer damping bed. Now the peaks are there but mean value is under the 10units.
I am attaching the log you can have a look and let me know if we should proceed with auto tune now !
Ps- due to some reason all 5 take offs and landing is somehow in one log I identified that by seeing the altitude reading. So you can see in the log the last take off. Please let me know what my next step be
https://drive.google.com/drive/folders/1dXFxx6TeOHLwH9TrVolPJZD5MeCR92s1
Hey
So we went for another test flight this morning.
And did an auto tune since vibes have come down.
We have saved the prams before doing autotine.
I am attaching the log file , but he vibes have gone up I suppose it’s beucsse of the way we attached the dead payload. We will rectify our deadpayload attachment and do another flight. Can you check how this autotune looks … des roll Vs att roll looks good to me is that right ?
Logs - 02-09-2023 - Google Drive
Hover throttle is not learning and saving below 0.125 yet it needs to be about 0.12 in this flight. This is a designed-in limitation of the hover throttle learning feature, so it doesnt go too low.
So you will have to manually set hover throttle
MOT_HOVER_LEARN,0
MOT_THST_HOVER,0.120
or add some payload and allow hover thrust to learn and save as it normally would.
This is affecting your hover and altitude. It might have affected the autotune result too.
Pitch D term is over-active, sometimes quite a lot with disturbances like wind. However pitch attitude control is a lot better than roll. I would tend to bring the pitch and roll PIDs a bit closer to each other, decreasing pitch values slightly, and increasing roll values. And slightly reduce the Yaw P and I so it is not interfering in pitch and roll, at least for now.
Also Pitch D term is very high in proportion to pitch P, which could even be causing hot motors.
And conversely, Roll D term is very low in proportion to roll P term.
ATC_ANG_PIT_P,15.47112 -> 14.0
ATC_ANG_RLL_P,5.25326 -> 7.0
ATC_RAT_PIT_D,0.008086581 -> 0.0032
ATC_RAT_PIT_I,0.07727969 -> 0.08
ATC_RAT_PIT_P,0.07727969 -> 0.08
ATC_RAT_RLL_D,0.002178005 -> 0.0032
ATC_RAT_RLL_I,0.08681365 -> 0.08
ATC_RAT_RLL_P,0.08681365 -> 0.08
ATC_RAT_YAW_I,0.08893732 -> 0.06
ATC_RAT_YAW_P,0.8893732 -> 0.6
And also reduce the Autotune aggressiveness a bit in case you run autotune again, but dont go below this.
AUTOTUNE_AGGR,0.08
Hey Shawn
So we did a flight today
Details as follows
We added 4kgs payload instead of 3kgs and didn’t play around with mot thst hover learn pram.
We did change the prams as mentioned above by you observed major oscillation
Log - 03-09-2023 first flight evening with changes of params.bin - Google Drive
2nd flight we did with prams which was saved 3 days back on 1st sept where there were no oscillation and then we took off did autotune in low wind landed and did a flight for log for your reference and advise
Log - 03-09-2023 fifth flight evening with old params & autotune in good weather .bin - Google Drive
Result - major oscillation in prams changes we did as you advised but when we reverted back to older prams setting she was flying good hence we went Ag head with autotune and finished it. Problem is the z vibes are still there.
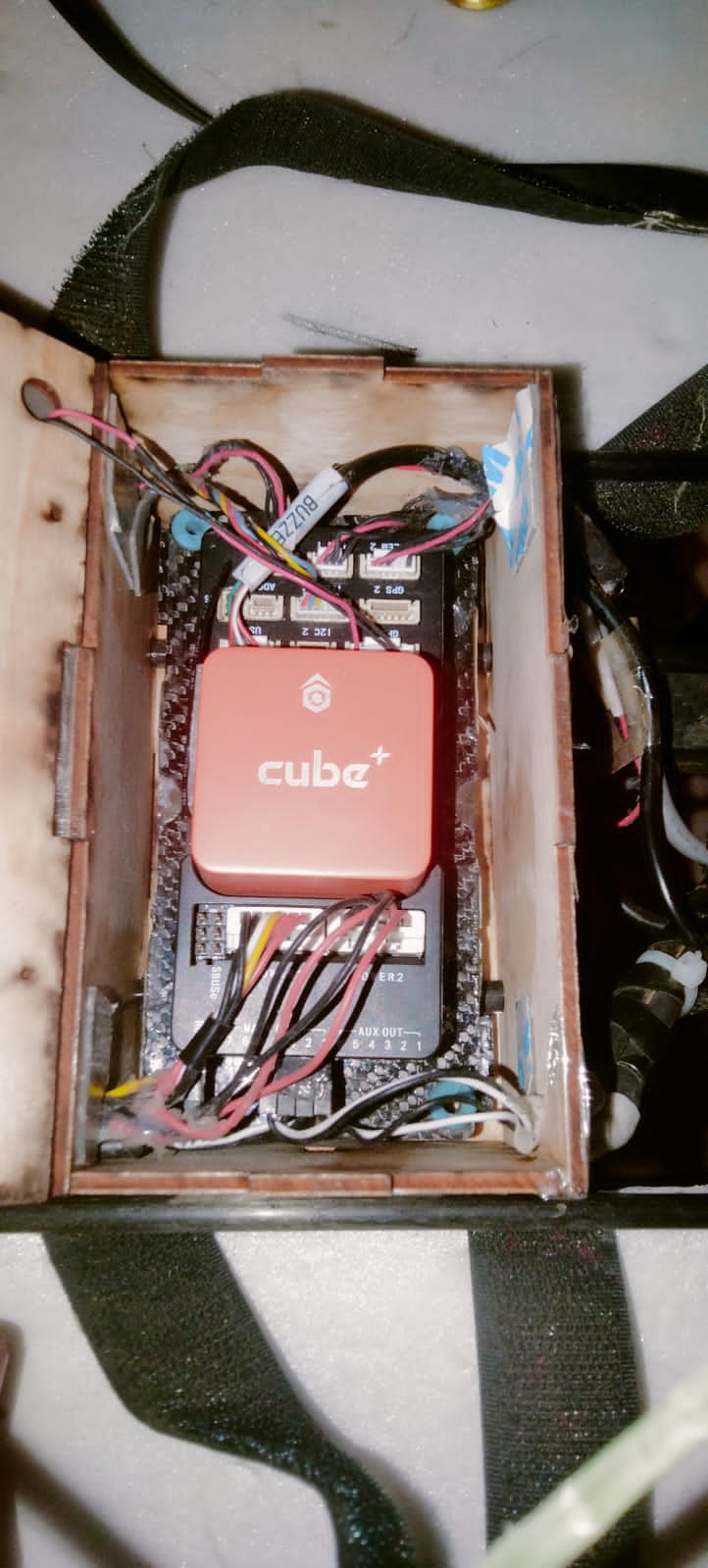
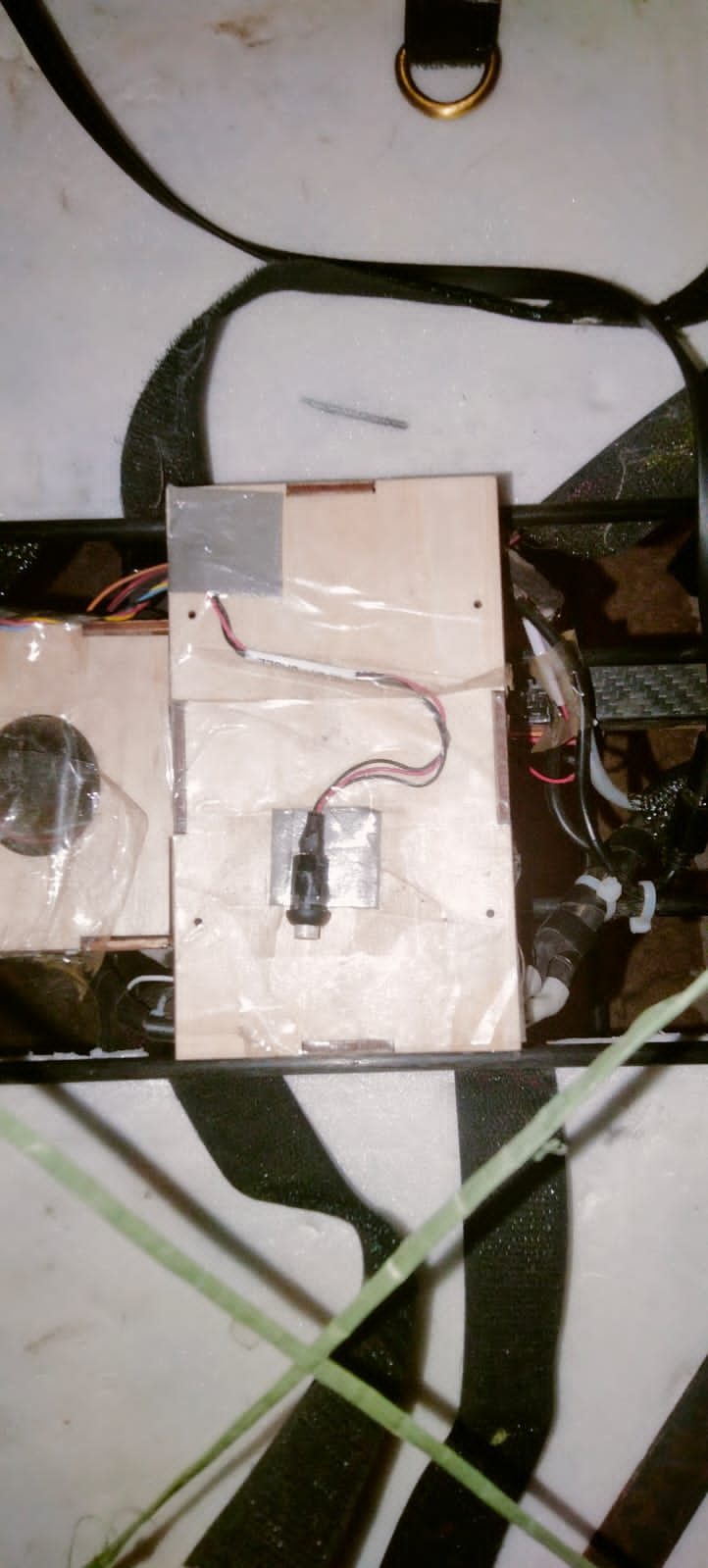
We have changed the FC base plate , new small dampers , 3M tape between Fc and Fc base plate. An external covered box to avoid prop wash, all wires conedctectors checked nothing touch Fc
Attaching photos below please advise what else can be done to reduce z vibes . Is it possible z vibes are coming when ever payload is increased should we do a test flight with 8kgs payload to Chekc if z vibes are increasing ? Can props be a reason ?



1 Like
As you found vibrations are still a problem. It could be that the box is the problem.
I think you should try a different motor thrust expo value, I suspect some of the issues might be coming from such a hogh value.
MOT_THST_EXPO,0.6
Do a cautious takeoff but I’m hoping stability should be better.
Thanks for the reply. We are just heading out for a test flight and will change the mot thst expo and do a take off and save the log and there after I will increase payload to check if any changes in vibes …
Do you suggest we should change the position of our FC it’s right in between the battery’s sets about 3 cm distance from each side.
Right not FC is at the CG point of the drone do you suggest we move the FC ? Or remove the Box around the FC and leave it open ?
Hey
So we did multiple flights
Details as follows
1st we did flight with mot thst expo -0.75 - 4kgs payload
Log -04-09-2023 first flight.bin - Google Drive
2nd we did flight with mot thst expo to -0.60 , 4kgs payload
Log- 04-09-2023 fourth flight.bin - Google Drive
3rd flight was done with mot thst expo -0.75 and 10 kgs payload
Log- 04-09-2023 fifth flight.bin - Google Drive
Results as per my understanding
The vibes have gone low on the last flight with 10kgs payload and expo to 0.75
In all other cases the z vibes are above 50units.
Is it a possibility that increase in payload is getting our vibes low ??
Our project - this drone has to fly with about 10-15kgs payload and drop the payload and fly back empty for search and rescue missions.
Requesting you to have a look and advise what can be done. And regarding PiDs I guess first we need to get z vibes mean value under 10 in all cases and then go ahead with PiDS ? Or PiDs can also be a reason for the z vibes ?
The “fifth” flight log looks reasonable.
You will have to change INS_HNTCH_REF to 0.14 but if the payload is secure enough you could run an Autotune like that and potentially arrive at useful PIDs.
Hi Shawn
So we did couple of flights today. We replaced the whole FC base plate and results are good in regard with vibes. This is constant in all flights only variable is payload and the notch filter prams you mentioned.
Details as follows
1st flight - payload 4 kgs
Log - 05-09-2023 first flight.bin - Google Drive
2nd flight - 10kgs payload
Log - 05-09-2023 second flight.bin - Google Drive
3rd flight - with your notch filter prams + 10kgs payload
Log - 05-09-2023 third flight.bin - Google Drive
4th flight with your notch filter and payload 16kgs
Log- 05-09-2023 fourth flight.bin - Google Drive
5th log - with your notch filter pram and 0 kgs payload
Log- 05-09-2023 fifth flight.bin - Google Drive
Result - the vibes have gone down in all logs expect the last one without any payload.
Your notch filter helped reduce the vibes even more log2 Vs Log3.
Couldn’t do autotune today due to strong winds.
Will go for autotune tomorrow with 4kgs payload since log 1 and log3 both have reasonable low vibes.
Do you suggest we do autotune with 4kgs payload or 10kgs payload.
Eventually the payload would be 15 kgs.
Also we noticed the drone in loiter mode or alt mode after a motion loses altitude before climbing back to original and inputs for that, I believe the priority to altitude is not set right
Please let me know
Regards
Hi Shawn
So we did couple of flights today. We replaced the whole FC base plate and results are good in regard with vibes. This is constant in all flights only variable is payload and the notch filter prams you mentioned.
Details as follows
1st flight - payload 4 kgs
Log - 05-09-2023 first flight.bin - Google Drive
2nd flight - 10kgs payload
Log - 05-09-2023 second flight.bin - Google Drive
3rd flight - with your notch filter prams + 10kgs payload
Log - 05-09-2023 third flight.bin - Google Drive
4th flight with your notch filter and payload 16kgs
Log- 05-09-2023 fourth flight.bin - Google Drive
5th log - with your notch filter pram and 0 kgs payload
Log- 05-09-2023 fifth flight.bin - Google Drive
Result - the vibes have gone down in all logs expect the last one without any payload.
Your notch filter helped reduce the vibes even more log2 Vs Log3.
Couldn’t do autotune today due to strong winds.
Will go for autotune tomorrow with 4kgs payload since log 1 and log3 both have reasonable low vibes.
Do you suggest we do autotune with 4kgs payload or 10kgs payload.
Eventually the payload would be 15 kgs.
Also we noticed the drone in loiter mode or alt mode after a motion loses altitude before climbing back to original and inputs for that, I believe the priority to altitude is not set right
Please let me know
Regards
Autotune with the minimal realistic amount of payload. If you planning to use 4Kg as minimum, use that.
Never ever fly with less than the minimum that you autotuned at.
Hi so we did autotune today with 4kgs payload which will always be the min take off weight of the drone.
The drone flys good but noticing some vibes could you check if. Z and y are winthin limits and for Z the vibes do touch almost 40units. Do you think it’s because of PID or a motor setup issue or anything else. We have changed FC bed also new dampers etc as mention above to Shawn.
Any help would be appreciated
Log - 08-09-023 4kg after autotune.bin - Google Drive
We did another flight with total of 14kgs payload this is going to be the max take off weight for this drone .
Log is attached below noticing same Z vibes . How are the pids after autotune
Log - 08-09-023 with14kg.bin - Google Drive
Regards
Hi so we did autotune today with 4kgs payload which will always be the min take off weight of the drone.
The drone flys good but noticing some vibes could you check if. Z and y are winthin limits and for Z the vibes do touch almost 40units. Do you think it’s because of PID or a motor setup issue or anything else. We have changed FC bed also new dampers etc as mention above to Shawn.
Any help would be appreciated
Log - 08-09-023 4kg after autotune.bin - Google Drive
We did another flight with total of 14kgs payload this is going to be the max take off weight for this drone .
Log is attached below noticing same Z vibes . How are the pids after autotune
Log - 08-09-023 with14kg.bin - Google Drive
Regards
You need to further address that high vibe issue before you even consider using autotune.
All Z vibes need to be bellow 20.
I was going to break out a few different points for each log, but they are much the same.
Copter is still a bit nervous, but motor outputs are good and there is plenty of thrust.
Vibrations are still a bit higher than ideal.
I would rerun autotune with the 4kg payload and
AUTOTUNE_AGGR,0.08
These filter settings work for both those flights with different payloads. There are only very minor differences in these settings to how you have them already, but it can make a difference.
INS_HNTCH_FREQ,28
INS_HNTCH_BW,10
INS_HNTCH_REF0.13
INS_HNTCH_HMNCS,3
In the 4kg log there is an strange noise at about 17Hz which isnt there at all in the 14kg log. I was wondering if something changed, or did the extra payload just dampen that vibration away.
Anything like a fan on a video transmitter, or some wires not properly secured can cause these vibrations.
Autotune will give strange results if there is too much noise, which is why you have to keep working on those Z axis vibrations.
Hi
We have tried everything literally with the FC placement to FC bed to additional damping but nothing seems to get the z vibes lower than 20 though the mean z vibes are below 15.
Any suggestions for z vibes since x and y and within less than 20.
Is it normal in big quad to have higher z vibes ?
Normal, yes.
Desirable no, defenitly not. Work harder, try different things.