https://drive.google.com/drive/folders/1WnbvOtLXzz0h6JV3BedGm41wJE1wiHNF?usp=sharing
Log file here to be checked for filters
https://drive.google.com/drive/folders/1WnbvOtLXzz0h6JV3BedGm41wJE1wiHNF?usp=sharing
Log file here to be checked for filters
You are creating duplicate posts.
Notch filter will look good with a small change:
INS_HNTCH_BW,27
INS_HNTCH_FREQ,54
Thank you we should be doing a flight in next 24 hours and will do what you asked for input shaping etc. will share updated log flight.
Thanks for the input
HI
so we went for a test flight and did multiple test flights sharing data of each log and result you may check the logs in google drive. each log is named and details are shared below. in loiter mode there were some vibes and oscillation observed. our current reading is working fine now. requesting you to have a look at logs and advise were are we getting it wrong . link for log - LOGS NEW PRAMS - Google Drive
LOG1 -
PID’s copied from Pitch to Roll
ATC_ACCEL_P_MAX,43974.74 * (30kgs/45kgs) = 29316.49
ATC_ACCEL_R_MAX,35578.32 * (30kgs/45kgs) = 23718.88
ATC_ACCEL_Y_MAX,10200.5 * (30kgs/45kgs)= 6800.33
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,27
INS_HNTCH_FREQ,54
MOT_SPIN_ARM= 0.10
MOT_SPIN_MIN=0.12
LOG 2 -
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74 * (30kgs/45kgs) = 29316.49
ATC_ACCEL_R_MAX,35578.32 * (30kgs/45kgs) = 23718.88
ATC_ACCEL_Y_MAX,10200.5 * (30kgs/45kgs)= 6800.33
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,27
INS_HNTCH_FREQ,54
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG 3-
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74
ATC_ACCEL_R_MAX,35578.32
ATC_ACCEL_Y_MAX,10200.5
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,27
INS_HNTCH_FREQ,54
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG 4 THIS IS WITH 6KGS PAYLOAD OBSERVED VIBRATIONS
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74
ATC_ACCEL_R_MAX,35578.32
ATC_ACCEL_Y_MAX,10200.5
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,27
INS_HNTCH_FREQ,54
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG 5_ GOT THE NOTCH FILTER TO ORIGINAL, NO VIBES OBSERVED OR OSICILLATION
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74
ATC_ACCEL_R_MAX,35578.32
ATC_ACCEL_Y_MAX,10200.5
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG 6- OBSERVED OSICILLATION AS WE COPIED PIDS PITCH TO ROLL
PID’s copied from Pitch to Roll
ATC_ACCEL_P_MAX,43974.74
ATC_ACCEL_R_MAX,35578.32
ATC_ACCEL_Y_MAX,10200.5
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG 7- ARMS CLOSE TO MOTORS WERE VIBRATING
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74
ATC_ACCEL_R_MAX,35578.32
ATC_ACCEL_Y_MAX,10200.5
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.34
PSC_ACCZ_P =0.17
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG 8-
HERE WE CHANGED THE PSC_ACCZ BACK TO OUR OLD READING STILL OBSERVED VIBRATION AND OSCILLATION
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74
ATC_ACCEL_R_MAX,35578.32
ATC_ACCEL_Y_MAX,10200.5
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.264
PSC_ACCZ_P =0.132
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
LOG9 IN THI LFIGHT WE CHANGED THE AATC ACCEL PRAMS AS PER INPUTSHAPING DOCUMENT - OSCILLATION AND VIBRATION NEAR MOTOR ARMS
PID’s WHICH WERE copied from Pitch to Roll brought back to autotune value in roll
ATC_ACCEL_P_MAX,43974.74 * (30kgs/45kgs) = 29316.49
ATC_ACCEL_R_MAX,35578.32 * (30kgs/45kgs) = 23718.88
ATC_ACCEL_Y_MAX,10200.5 * (30kgs/45kgs)= 6800.33
MOT_THST_HOVER: 0.17
PSC_ACCZ_I =.0.264
PSC_ACCZ_P =0.132
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
MOT_SPIN_ARM= 0.09
MOT_SPIN_MIN=0.11
hey
so we did another test flight today with almost post autotune prams and changed prams as per mt_thst. still no good results. we did multiple flights with little changes in pid still were facing oscillation . then again reverted back to post autotune pids and changed. the drone behaved weirdly in one flight.
1 during take off in alt mode the drone went up almost 10 meters and then came down during this time pilot input wasn’t helping.
2 still there was sever vibrations(during low rpm as per our understanding ) in two motors and they were hotter than other two post landing ( photo in drive link at the bottom)
3 there were some click sounds during low rpm from one of the motors
4- during landing just 1 odd cm from touchdown the drone yawed in alt hold landing.
i am uploading logs , prams, and photo of drone with winddirection. please have a look and plese advise where we are going wrong and what are we missing out. i have read the arducopter initial tuning but no help. if you could guide towards the right direction
also- as per motor capability we are running it at1/4th of mtow
https://drive.google.com/drive/folders/1PHVoro2C5QSdRKuvRUe2u4S6xZNKA-KQ?usp=drive_link
Oscillations are bad, and motors are often hitting minimum output which will be affecting stability too.
You will need to add some dummy payload - pick some amount of payload and stick with it. Later after all tuning is completed you can look at other payload weights.
Vibrations are bit too high - have you got a photo of the flight controller mounting and wiring? You will need to find a way of minimising vibrations before continuing, although some of the erratic oscillations could be contributing in this latest log.
MOT_BAT_VOLT_MIN is definitely wrong and will be affecting motor thrust scaling quite badly. I specify the correct value further on, keep reading…
Previous Autotune results will be unsuitable until those things can be fixed, especially the vibrations. I’ll check through a couple of other logs if I get the chance - it sounds like it was flying better than in this latest log.
EDIT: I did look over a previous log that had much better flight, so I have considered that in my recommendations.
All the parameters I’ve specified below should ALL be applied at once before the next test flight. I’ve just broken them out into sections to explain them.
You definitely need to set these
ARMING_CHECK,1
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
FENCE_ENABLE,1
Every safety feature available should be used - 43 inch props will probably slice through a car. The last thing you want is this beast falling from the sky or heading off over the horizon.
During testing is where you need all these setting the most!
With those Hobbywing X motor/ESC sets you need to set these
MOT_PWM_MIN,1050
MOT_PWM_MAX,1950
MOT_THST_EXPO,0.8
and retest for the MOT_SPIN_ARM value.
Set these to better suit your battery:
BATT_ARM_VOLT,43.30 // 44.70
BATT_CRT_VOLT,40.60 // 42.00
BATT_LOW_VOLT,42.00 // 43.40
MOT_BAT_VOLT_MAX,58.80
MOT_BAT_VOLT_MIN,37.80
also more conservative values are shown after the “//”
And set ALL these before the next test flight, some will definitely need adjustment as more data is collected but they should be OK for now.
ATC_ACCEL_P_MAX,20000
ATC_ACCEL_R_MAX,18000
ATC_ACCEL_Y_MAX,8000
ATC_ANG_PIT_P 7.5
ATC_ANG_RLL_P 6.5
ATC_INPUT_TC 0.20
ATC_RAT_PIT_D 0.004
ATC_RAT_PIT_I 0.10
ATC_RAT_PIT_P 0.10
ATC_RAT_RLL_D 0.004
ATC_RAT_RLL_I 0.10
ATC_RAT_RLL_P 0.10
INS_HNTCH_BW,8
INS_HNTCH_FREQ,17
INS_HNTCH_HMNCS,39
INS_HNTCH_REF,0.11
LOG_BITMASK,180222
PILOT_THR_BHV,7
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
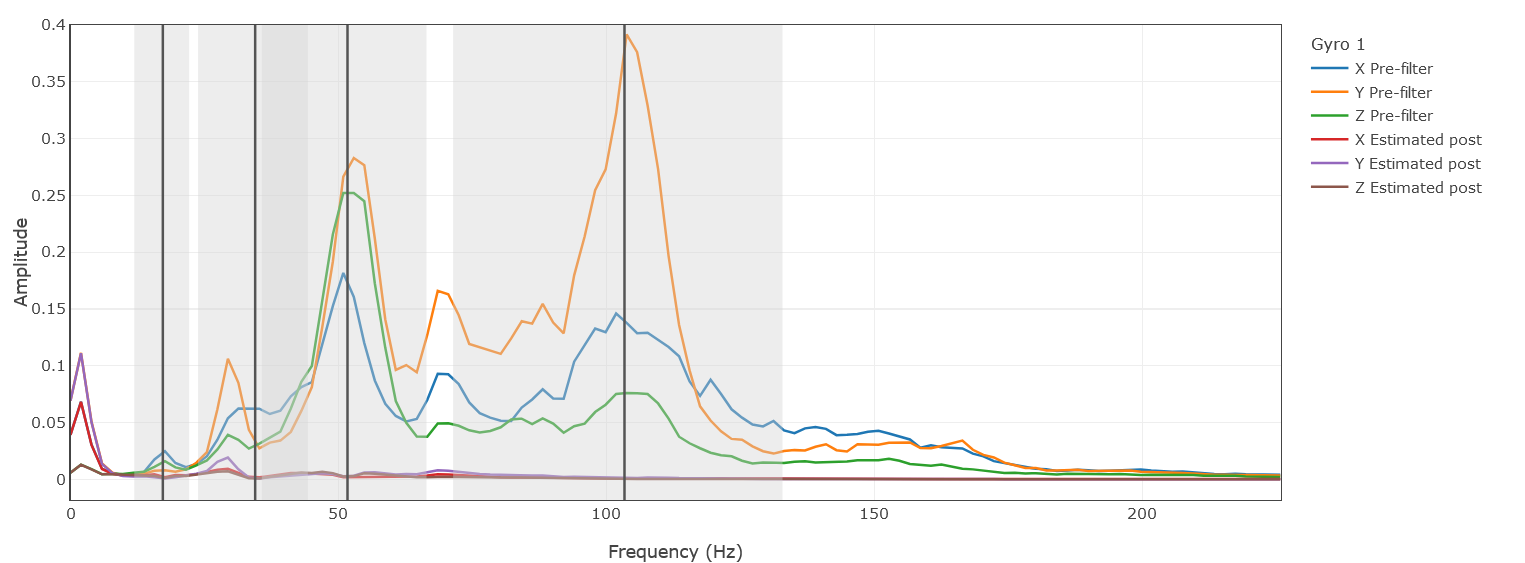
This is the filter result with those new values (based on one of your previous logs with reasonable flight)
Ok will put about 3kgs payload
FC photo will share soon but we have used multiple dampers will share the photo soon
These erratic oscillations were not there before today’s flight and mot bat prams were the same. I shall change these prams to one you mentioned that is exactly what was mentioned in battery specs somehow we missed it out
I shall enable the safety testers as mentioned
Rest all prams mentioned by you will be be before the next testing .
Really appreciate all your inputs and will get back to you on 31st post our flight that day
Thank you
Hi
So we did 2 flights today details as follows
Flight done with 3kgs payload attached at CG point below FC(pixhawk cube orange )
1st flight with all the prams you had suggested to be changed
2nd flight is for rtl test
Observations - both flight we observed high z vibes , minute oscillation and the drone was flying better than before but we didn’t fly much because of z vibes. Photos of drone is also uploaded in the link mentioned below the FC is inside the white box,
Humble request to check the log data and advise us on tuning. Do we have to do an auto tune ? Also do you freelance for such projects?
Hoping for a quick reply
Regards
Link to log file and picture - 31-08-2023 - Google Drive
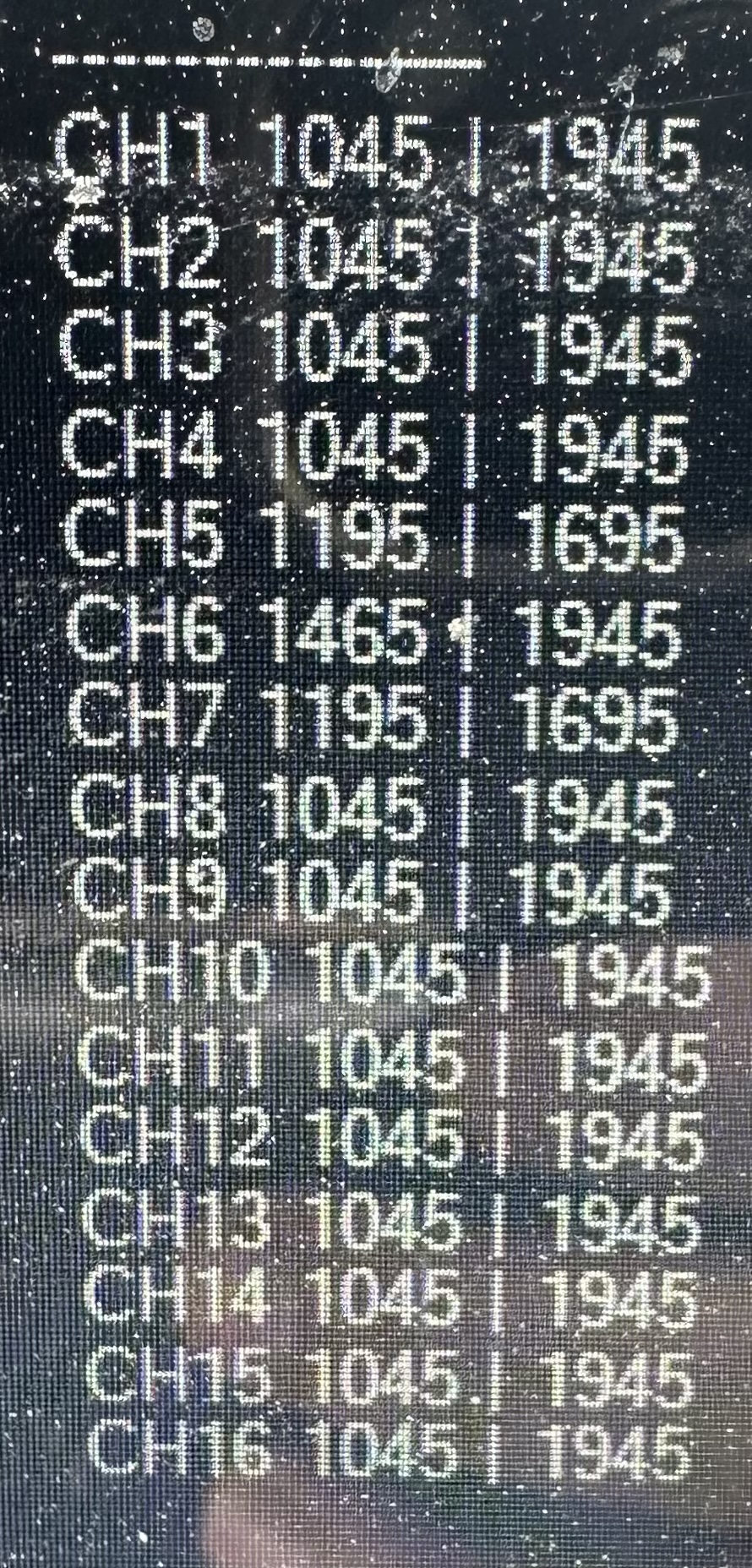
Also to add we had changed the mot pwm to 1050-1950 as suggested by you and then carried out radio calibration.
During radio calibration we got a different pwn attaching picture please advise new values to be set or continue with 1050-1950
Radio calibration, “pilot inputs” dont correlate directly to the motor output range that can be dependant on the ESC. That is an outdated concept that was changed in parameters a while ago and motor output range now defaults to 1000PWM to 2000PWM regardless of RC calibration.
Thanks for the prompt response. So Pwm values are set. I had done the prams changes and log is done if you could check and advise then I can go for another flight in an hour and share you the logs and then can go tommorow also for 3 flights.
Z axis vibrations are too high.
You will need to look at securing wiring, and making sure nothing is touching the flight controller or wires pulling it.
Usually Z axis vibrations are because of prop wash over the arms and base plates, even directly over the flight controller. You might need to change the flight controller mounting system and how it is covered.
Also make sure the frame is strong enough for the weight of those batteries and flex is not enhancing the vibrations.
There could be a whole range of things you need to look at.
Harmonic notch filter is configured wrong which might be my fault. I’d have to check in the last log file I looked at, so maybe even the change is because of the correct MOT PWM values - unsure.
Anyway this is what you would change based on the new data:
INS_HNTCH_FREQ,27 (instead of 17)
INS_HNTCH_BW,10
INS_HNTCH_HMNCS,7
This will reduce the chances of the filter is not interfering with attitude control.
And these to settle down the oscillations in altitude:
PSC_ACCZ_I,0.252
PSC_ACCZ_P,0.126
Ok so now we have just opened the FC box and changing the wiring setup so none of the wires touches the FC
Should I make the FC box close to air tight conditions I avoid any prop wash ?
There is no flex in the battery tray made of round carbon tubes
I will just do the notch filter changes and the other prams also and go for a test flight .
How is the pids? Des roll vs actual roll and fed pitch Vs actual pitch ? Should we do some changes with pids also ? If you suggest !!
I would leave PIDs until we have more information.
The FC box shouldnt be totally sealed. being a flat surface it may be more affected by the prop wash too.
Fixing Z axis vibrations can be a long road.
Ok not sealing it completely, any suggestions for FC mounting to avoid prop wash ? Also just a question. The wires being attached to FC should they be tight or lose packed ?
Ok not sealing it completely, any suggestions for FC mounting to avoid prop wash ? Also just a question. The wires being attached to FC should they be tight or lose packed ?..
Wiring should be attached to the frame, with just enough slack where they connect to the flight controller to not shake around too much, but also not pull on the flight controller.
Ok thanks for the reply we have done some changes going for a flight now let’s see how much it helps . Just concentrating on z vibes as of yet
Hi so we did 4 flights details as mentioned below
First flight - the base of FC was tightened with 4 more extra damping screws- total 8 damping screws on the base plate and only 4 was used initially now we used all 8.
Second flight - as in first flight but additional weight was added about 25grams on the FC cover box with double side tape
Third flight - as in flight 2 and 1 but added foam between the FC base plate to reduce prop wash durning descent and assend.
Forth flight - as above changes except the 25g was not place on FC box this flight .
Overall I feel flight 3 had less z vibes. We noticed high z vibes durning assend and descent hence we put foam between the FC base plate to reduce the amount of air entering the FC box
Logs are attached in the link - 4 logs as named mentioned above
https://drive.google.com/drive/folders/1u8xJLwltL9_TjfQ31g7XO1g8rY2rHQml?usp=sharing
Looking for forward for your advise
Hey Shawn
Can you please check the logs if able we are at the flying field itself right now