This is a discussion to analyse issues with yuxuanwu1234567’s rover. This report comes from this issue but I’ve moved it here so we can handle it better as a support issue.
yuxuanwu1234567 can you provide a .bin log? It looks like on the issue you’ve provided tlogs which sadly are just not very useful because they don’t contain enough information to really diagnose most problems.
This log is a 4.0 log and the vehicle isn’t in Guided mode which I think is when the issue appears. If you are happy to upgrade to 4.5.x and do a quick test where you switch it into Guided mode and it doesn’t work correctly then I’m happy to have a look again.
Using really old versions is fine of course, it’s just that I have a limited amount of time to spend on support issues so I can’t really provide support for AP versions older then 4.2. 4.0.0 was released in April 2021.
Thank you very much! This issue has been resolved, but I have encountered a new problem. I have moved the scale of the mission planner to its maximum, and the car is always at a certain distance from the calibration point. Is this because the guided mode of the mission planner allows for an error of 0.5 meters? Due to the use of motion capture data in unmanned vehicles, I have high requirements for accuracy.
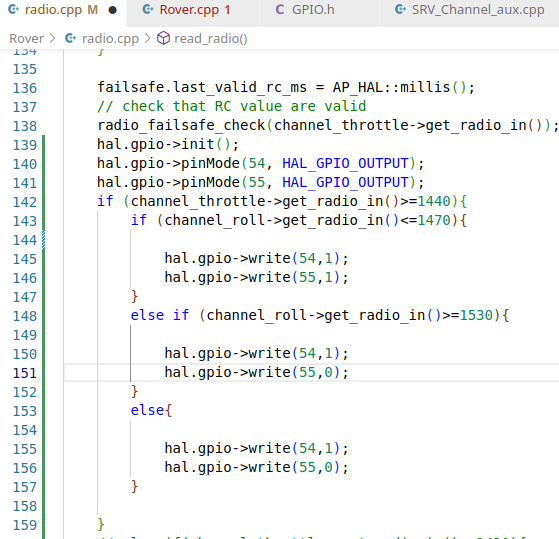
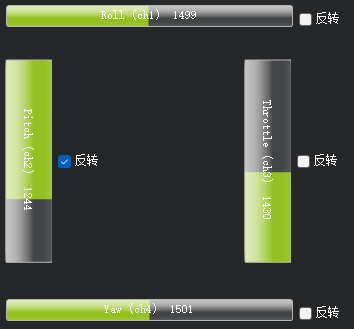
After updating 4.5, the motor cannot reverse, resulting in two motors rotating in different directions. How can I modify the source code so that I can use the throttle to control the unmanned vehicle to reverse.
Even if I tick ThrottleLeft on the servo output, I can’t push the throttle up to reverse the motor. Pushing the throttle up and down has the same effect on the motor.
OK, it sounds like maybe the vehicle requires using the “BrushedWithRelay” setup that is documented on this page.
This really is a guess though. It would be best if you could provide some pictures or wiring diagrams of the setup. Maybe provide links to the motors you’re using…
Txs for the feedback. I don’ think these motors can be connected directly to the autopilot though right? There must be an ESC / motor driver between the autopilot and the motors isn’t there?
Yes, you are right. Both motors are connected with four wires. The red and black wires are connected to the electrical adjustment distributor, which is connected to the electrical adjustment distributor. The blue wire is connected to the main out signal of Pixhawk, and the white wire is connected to the aux out signal.
I guess that “electrical adjustment distributor” means ESC (aka Electric speed controller) or motor driver? The verified list of motor drivers is on this page. Does the vehicle have one of these?
Yes, I have one of them and connected it to pixhawk, but checking the reverse option in the mission planner does not work. The two motors are DC brushless. How can I write code to reverse the motors.
I looked at the introduction of the motor and found that the white wire can control the direction of the motor, and the white wire is already connected to the pixhawk.
You are doing yourself no favors by continuing to evade answering the most basic questions. I realize English may not be your language of choice. If that’s the case, feel free to post more detail in any language. You might be surprised at the responses (for example, the developer you’ve been talking with works in Japan…).