I made a few discoveries this weekend. My VIBE values were very low because I had the Cube on a very squishy vibration damping mount, and I think that mount is the reason I’ve had trouble tuning the roll axis under 4.1-beta. The Cube already has internal vibration damping, and it shouldn’t need more. I naively thought that eliminating all vibration was a good thing, but I’m now more impressed than ever with the whole ArduPilot ecosystem - the control loops run fast enough to detect and correct for extremely small perturbations and it’s GOOD to let the FC “feel” nearly everything that the frame is doing (with notable exceptions, of course that are, for the moment, beyond the scope of this thread).
So, I hard mounted the AP using some heavy duty 3M mounting tape, and the sensed vibration increased quite a bit (but not clipping). My first attempt at autotune with the new mount was going very well (no “failure to level” messages), but it was cut tragically short.
The adventure is over for now…it crashed. HARD.
After a couple of late night hover tests with the hard mounted FC, I got up and began running the first autotune routine in pretty calm wind. The roll terms were increasing nicely when the props stopped, telemetry disappeared, and it just fell from the sky from about 30 feet.
A look at the log makes it look like the battery completely died, and all logging/telemetry ceased at the moment of failure. However, there were still lights blinking on the quad when I got to it, and a cursory check of the offending battery shows that it’s mostly balanced with a little under half charge remaining. Another boot cycle with the same battery brought it right back to life (worse for wear, of course), it armed, spun the motors, and probably would’ve flown if I increased the throttle (no prop damage - it pancaked on the landing gear which absorbed most of the impact, along with my camera gimbal (I was tuning with it installed because it sits low and affects the CG quite a bit).
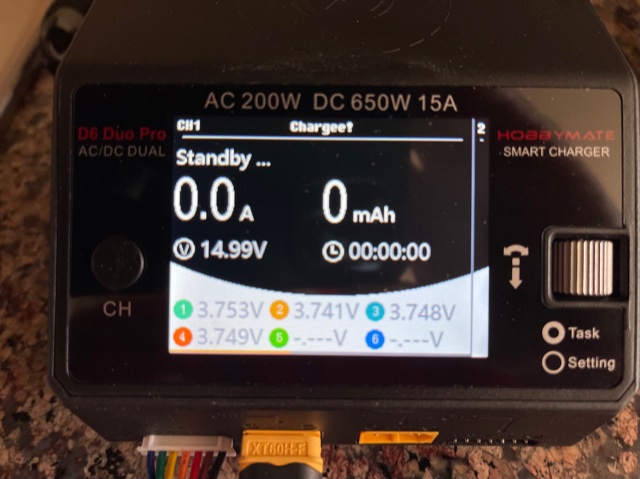
Post crash battery stats:
I need to get some yardwork done today, so I’m walking away from the quadcopter project for now. I’m not giving up, but I need to put it down for a bit. Here’s a link to the log file for the crash.