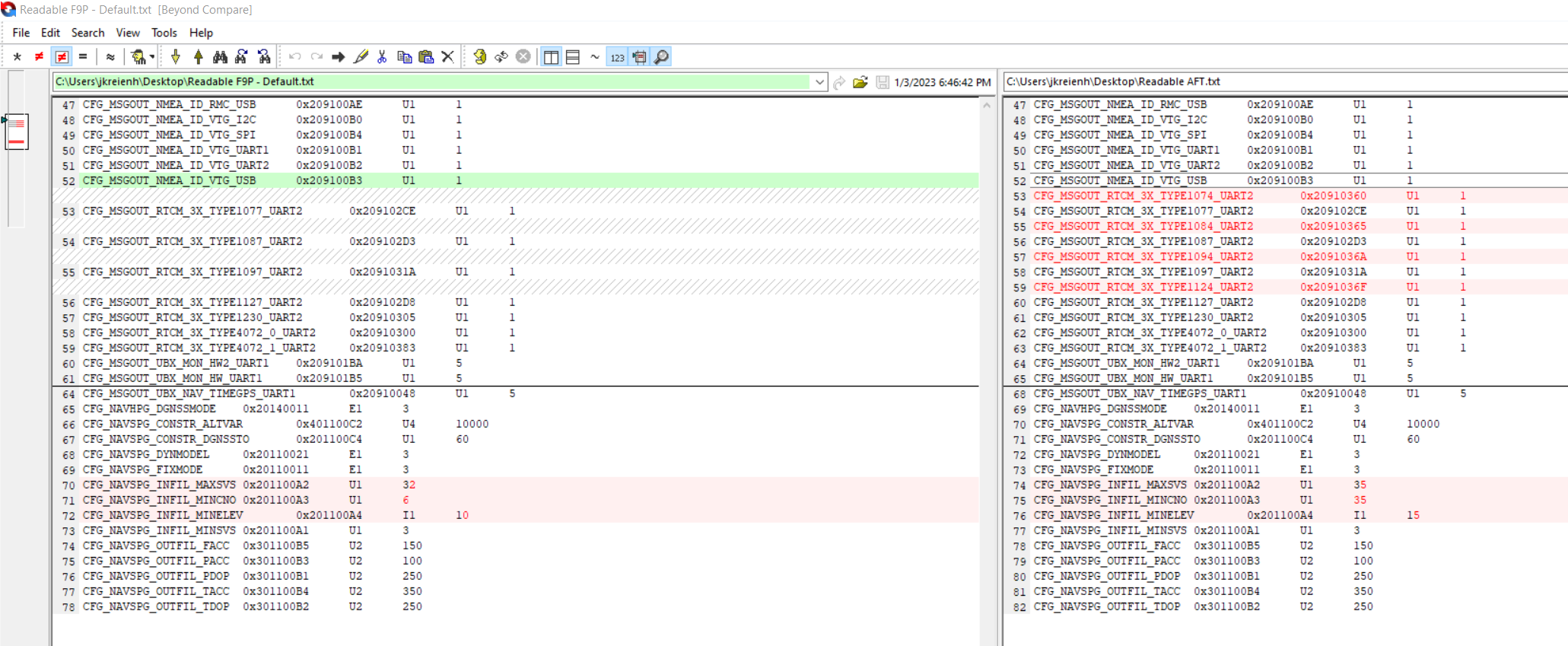
Pretty easy to see what’s different between this default F9P config and a config I saved off.
4 Likes
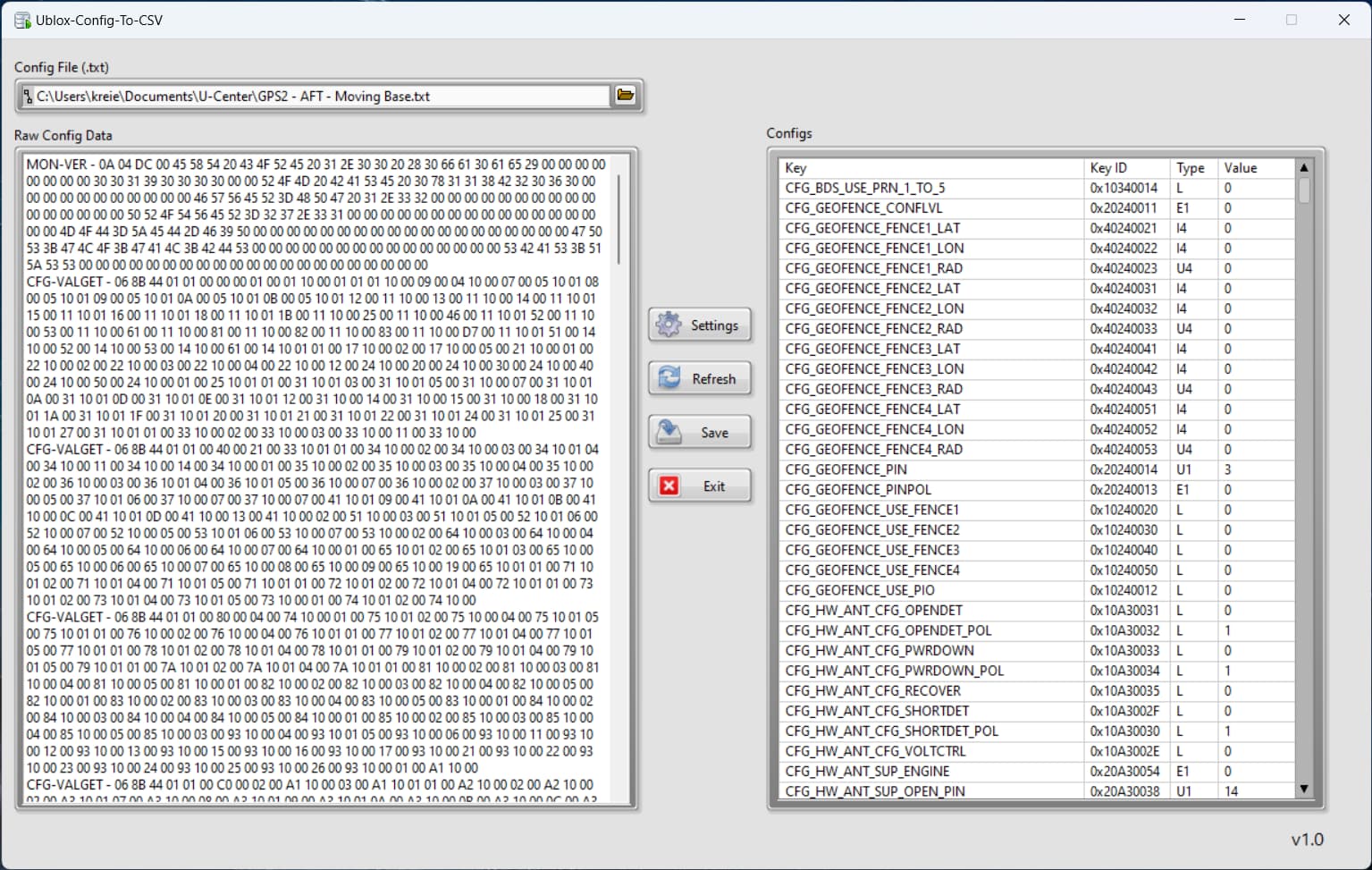
That would be very useful!
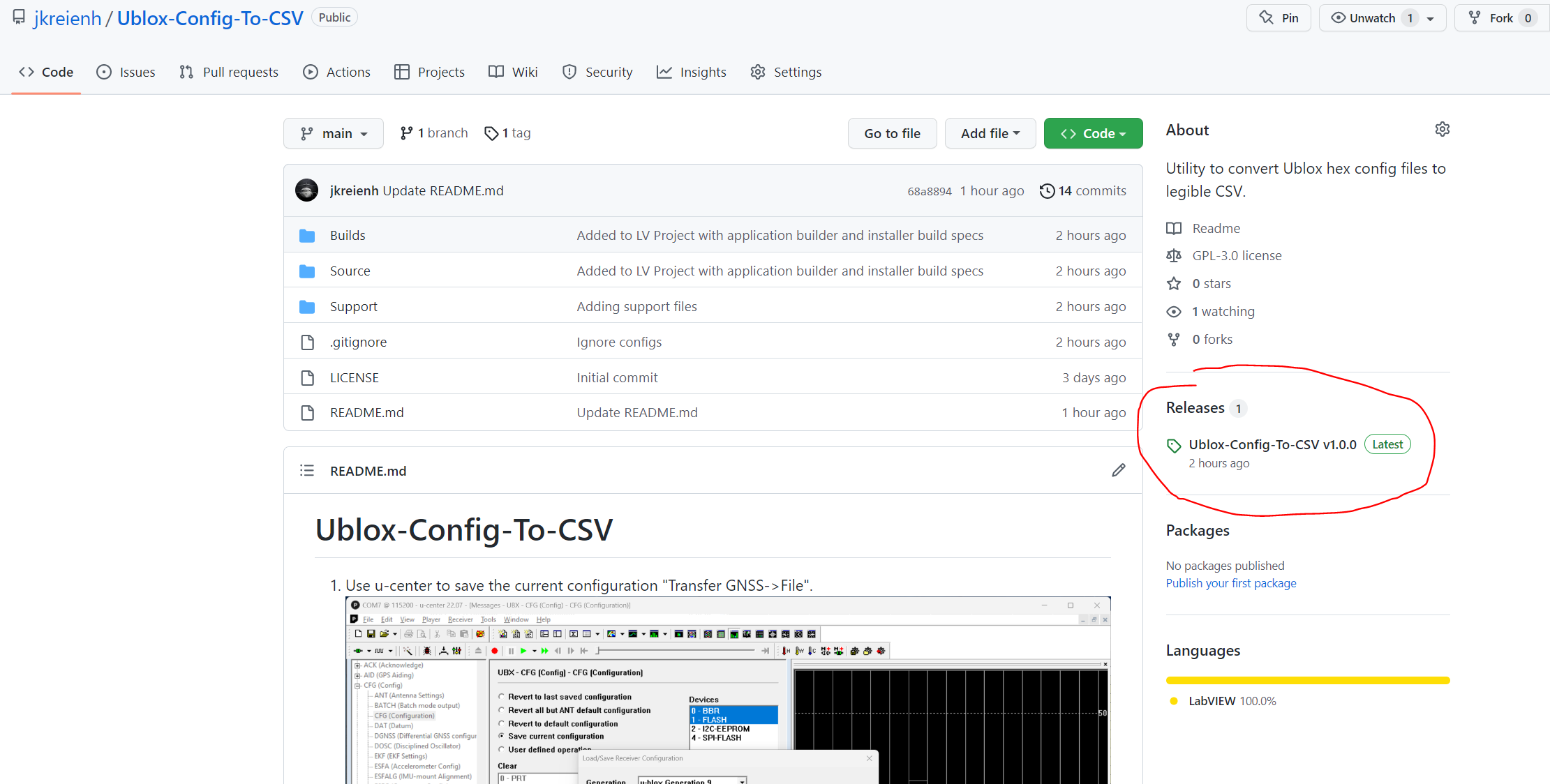
No worries… GitHub has moved the link to releases several times. It would be the first zip file under assets.
1 Like
Thanks for making this tool and providing it for all of us to use. This was a great idea and a valued contribution!
1 Like
hello guys.
I’ve seen you have each problem and we figure out the same issues with GPS for yaw.
I’m trying this tutorial ArduPilot simpleRTK2B+heading configuration + external corrections with these hardware = simpleRTK2B and simpleRTK2Blite
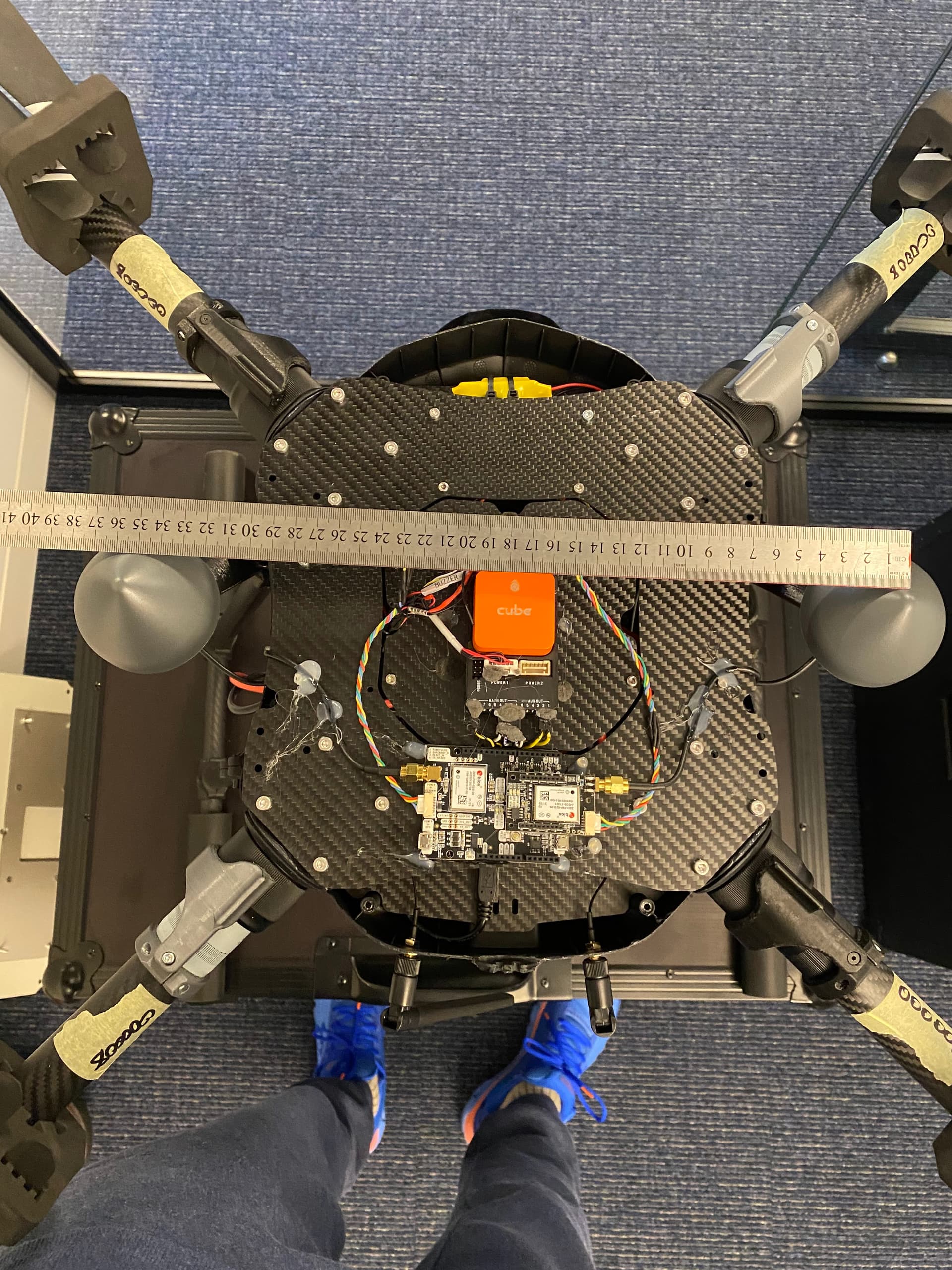
I want to leave from compasses on my Arducopter = photo in this post.


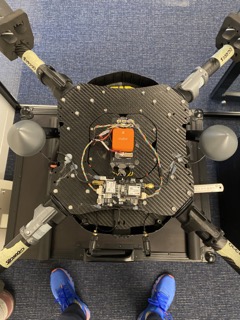

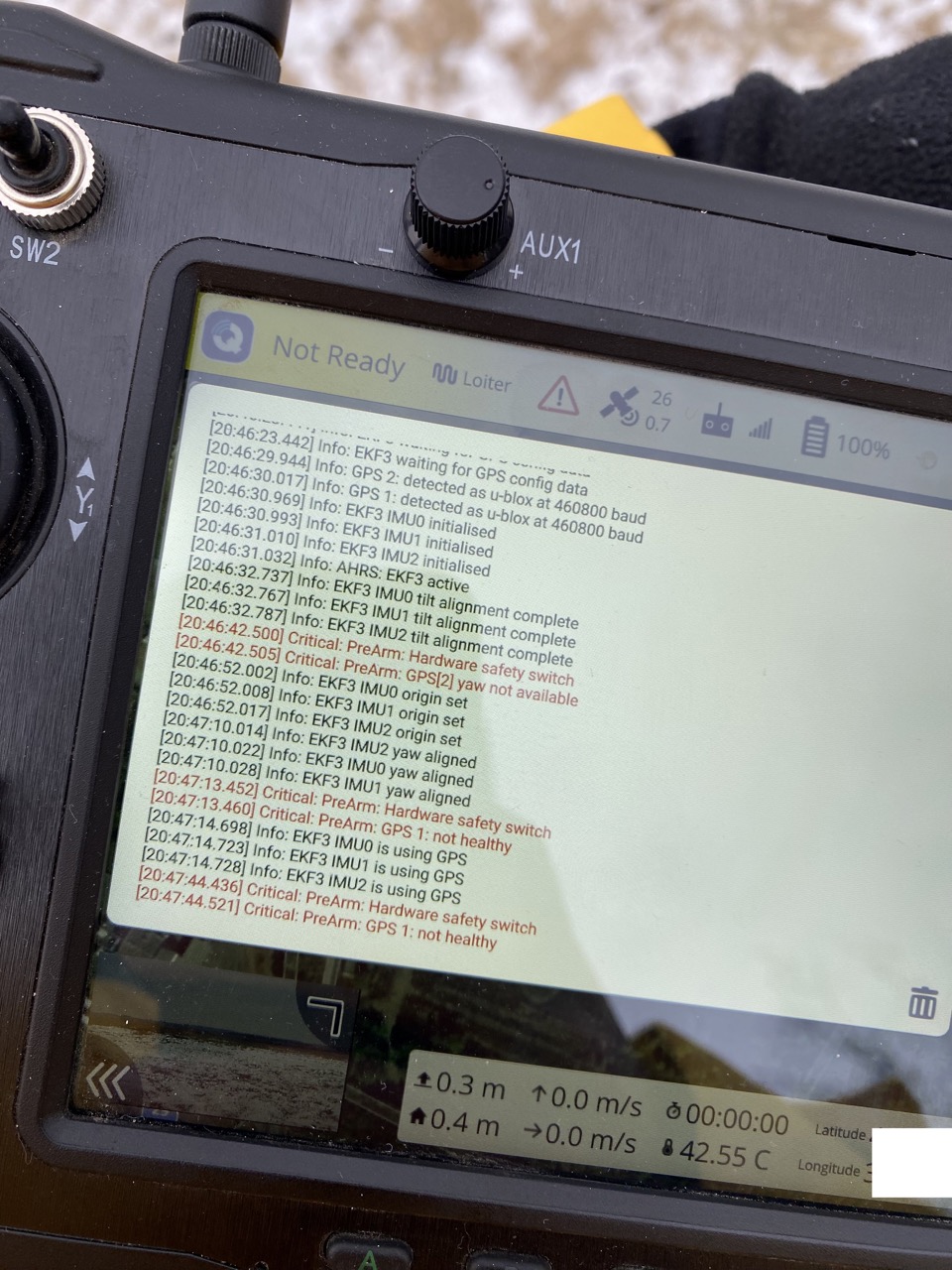
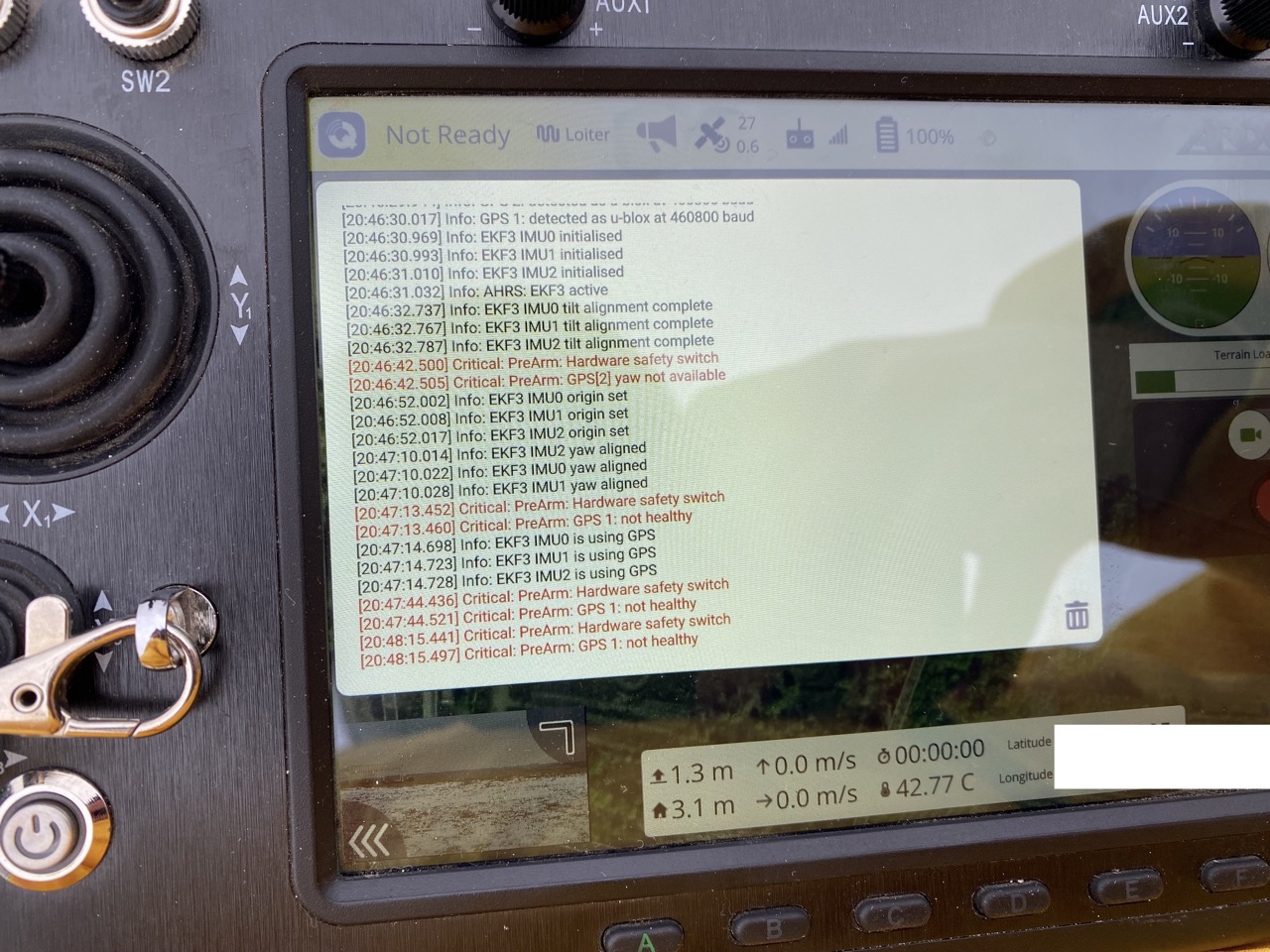
but I have problems with GPS[2] yaw not available
Please help me with it and how can I fix it?
thanks
@Yuri_Rage @rmackay9

Need a .bin log to troubleshoot anything. Poor pictures of error messages are not enough for troubleshooting.
If you can’t provide a log, at least provide the parameter file.
In the meantime, check that you have correctly configured all of the GPS_POS parameters according to GPS for Yaw (aka Moving Baseline) — Copter documentation (ardupilot.org)
1 Like
Thank you @Yuri_Rage
here is the param file
Djura-mk6-000008-ardusimple.param (18.0 KB)
and photos in original size


log file I will send later but I can not fly while I have this problem and my log file has not have much information.
Your configuration looks correct except that SERIAL3_PROTOCOL probably should not be set to 5 (meaning a third GPS).
I suspect a potential error in the way you configured your GPS modules with the ArduSimple configuration files. You may have trouble using those files if your GPS module firmware is up to date (v1.32), since the config files were designed under uBlox 1.13 firmware. Contact ArduSimple to resolve that issue, if it is the case.
3 Likes
There are quite a few requests on “Unhealthy GPS signal” issue, but there does not seem to be a final conclusion how to get rid of it once and for all or did I miss it?
Having GPS_AUTO_CONFIG=1 does not fix it (at least for now while indoors without antennas connected). GPS_RATE is at 200.
Firmware improvements fixed it. Your problem is being indoors with no antennas…literally creating an unhealthy GPS signal…
And you shouldn’t apply power to anything that requires an antenna without having an antenna connected. Good way to damage components.
After so many hours and hours of struggles, finally made some real mowing, hence wanted to take an opportunity to thank everyone who helped through the struggles, especially @Yuri_Rage , @ktrussell - without you guys, I would have not even started this project, you were my inspiration.
Eventhough it’s up an running, there are still a few things lined up to be done:
*make turns more precise and get rid of the S weaving
*get rid of the Unhealthy GPS Signal (after setting GPS_AUTO_CONFIG =1 lost Yaw)
*add active bump protection
*add computer vision for object avoidance
*re-do the servo linkage to make it easier switching to the manual control with sticks
*create a script to detect unexpected behaviour-movements in auto mode (e.g. lost control in case of some technical failure)
*fences fences fences… I don’t like how it goes (or doesn’t) around the circle fences, and there are so many of them in my field (even too many for the autopilot)


2 Likes
Looks like its working well, i have some question around the fc install location. If it’s in the box it is far behind the pivot point and without any calculations it would mean that as the mower yaws right for instance to close in on the intended track the actual position of the fc would move further away making the error larger, is this all handled properly by using the offset parameters in ardupilot or does the install location make a difference to the resulting difficult in tuning of turn rate etc??
Positions of both GPS antennas and FC can be defined as parameters. In my case FC and antennas are to the back of the pivot axis (54 and 9cm accordingly). Also FC is not dead center on the Y axis as well.
At the time of the filming only the positions of the antennas were parametrized (GPS_POS_Y and X). Afterwards FC position was specified with INS_POS parameters, pivot turns seem to be nicer now. Yet sometimes it still makes and odd S curve, but less frequently. E.g. here the 3 paths are spot on, yet on the 4th one it overcorrects to the left for some reason:

2 Likes
Thanks for the pic, I think the final derived position does include the inputs from accelerometers in flight controller as well as gps so without the parameters being set for install position offset the results will surely be wrong. But I haven’t looked into it in detail in the Logic diagrams for the fc code, it would be pretty amazing if the offsets are accounted for and calculated correctly. One way to test would be to install both fc and gps in the perfect centre of the pivot axis and test then move them both far away and add the offsets and test again, if the code is done right it should drive the same way,
The offsets all work exactly as intended/expected. I did extensive testing on this and helped fix a related bug.
3 Likes
Looking great! Congratulations!
1 Like
Well I am probably doing something dumb but I have gotten myself stumped over a seemingly simple problem. I have made a few changes and I can no longer use my RC transmitter RC7 switch or the Actions control center in Mission Planner to mark waypoints. It used to work and then I updated my Mission Planner to 1.3.80 build and my flight controller firmware to ArduRover 4.2.3. I wouldn’t think those upgrades would have changed anything. I had also switched my RC7 channel over to allow me to switch Acro mode on and off for tuning. I can use that same switch to turn on and off Acro mode and I can see the flight mode change on the screen. However, when I change the Parameter on RC7 to 7 (Save Waypoint), I get nothing. I am pretty lost with not being able to accurately mark waypoints. My google maps don’t match reality all that well. I can still set points by clicking the planning screen, but sometimes that is off a bit. I had also loaded one of the sample Lua scripts and then deleted it, since I was having this other problem. I am probably making some simple mistake, but it’s got me stumped.
Steve, hope you are not forgetting to click Read to get those saved WPs from the autopilot, otherwise they are not displayed in the MP.