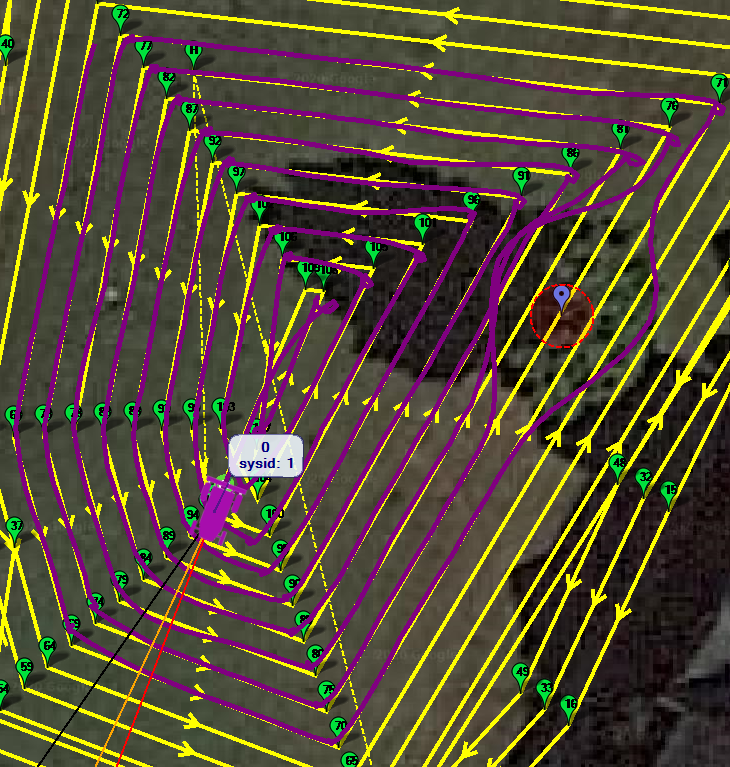
This evening I tightened up the steering tuning and got really aggressive with the NAVL1 values while playing with BendyRuler.
I’m not sure if the following parameter values are truly optimized or if I have some errors of cancellation masking one another, but the screenshot shows some REALLY good results, including a fairly tight margin around a 1.5m circular exclusion fence around my front yard tree.
ATC_ACCEL_MAX,0.8
ATC_BRAKE,1
ATC_DECEL_MAX,5
OA_BR_LOOKAHEAD,3
OA_MARGIN_MAX,0.1
OA_TYPE,1
NAVL1_DAMPING,0.8
NAVL1_PERIOD,2
NAVL1_XTRACK_I,0.02
WP_OVERSHOOT,0.1
WP_PIVOT_ANGLE,45
WP_PIVOT_RATE,37
WP_RADIUS,1.3