@dkemxr
Hello Dave, another drone another harmonic filter.
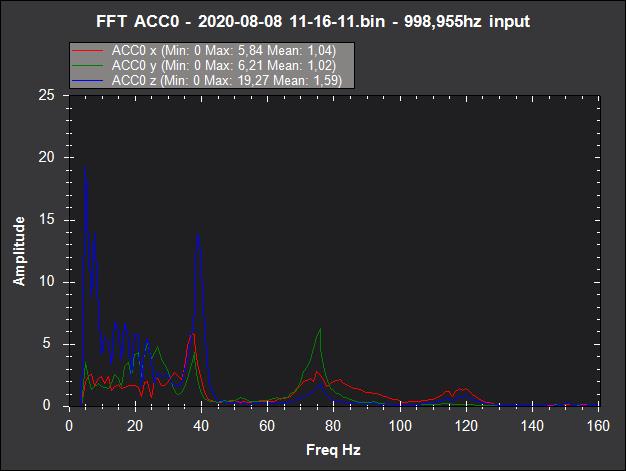
This is my pre-filter data:
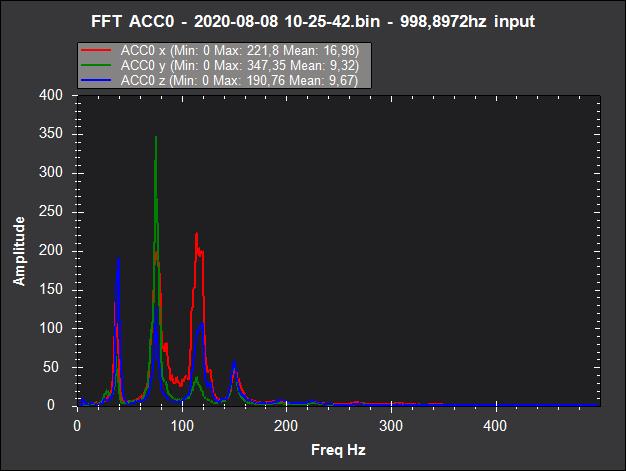
First attempt:
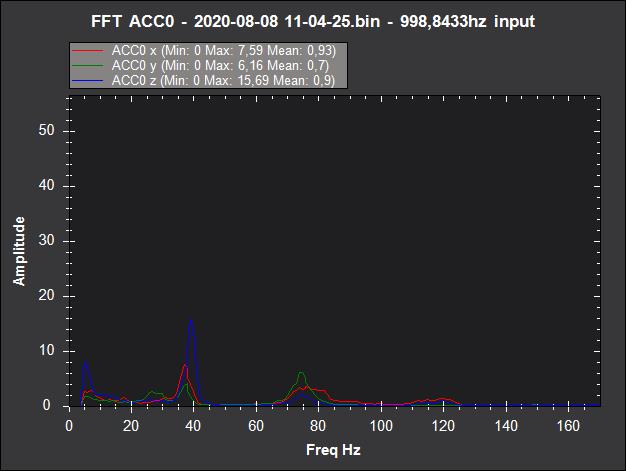
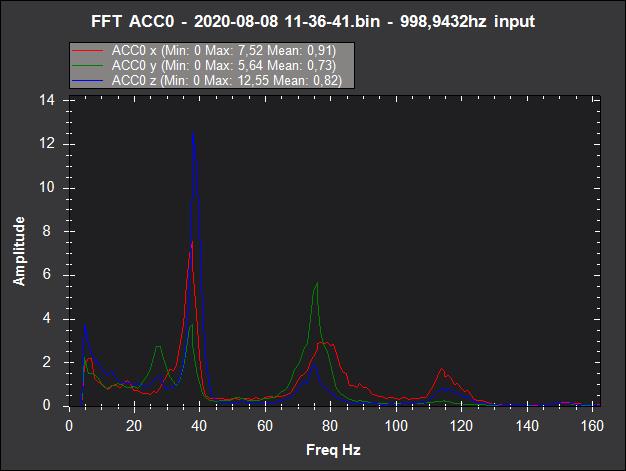
post-filter 01
INS_HNTCH_ATT,40
INS_HNTCH_BW,18
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,38
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.25
INS_NOTCH_ATT,30
INS_NOTCH_BW,25
INS_NOTCH_ENABLE,1
INS_NOTCH_FREQ,150
Second Attempt:
post-filter 02
INS_HNTCH_ATT,40
INS_HNTCH_BW,20
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,39
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.25
(Same static notch params)
Last attempt:
post-filter 03
INS_HNTCH_ATT,40
INS_HNTCH_BW,15
INS_HNTCH_ENABLE,1
INS_HNTCH_FREQ,39
INS_HNTCH_HMNCS,3
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.25
(Same static notch params)
All logs are here:
https://drive.google.com/drive/folders/10BFRuw8QVL0him2XYxkYNIA0NJ7zKLD2?usp=sharing
Before enable harmonic notch, the drone was very senstitive to commands, but in each of those attempts, it was a lot more sensitive. I’m using standard PID.
I really want to hear what you think of my results.
Thanks again.