Hello everyone, I’m having troubles with my large copter since I’ve update to 4.0+ version. I flew hundreds of time using 3.6.12, everything was perfect, but since i’m using 4.0+ I cant make an auto flight becouse my copter dont face the next waypoint, it keep spinning round and round without face the path. (crashed twice)
I’m here becouse I ran out of ideas, I did everything I’ve found at similar topics.
Lets start with my copter configs:
-Hexacopter using T-motor brand new motors, esc and propeller (recommended by t-motor);
-Motor: MN501-S KV240;
-ESC: 40A Air;
-Propeller: folding carbon fiber FA22.2x7.2;
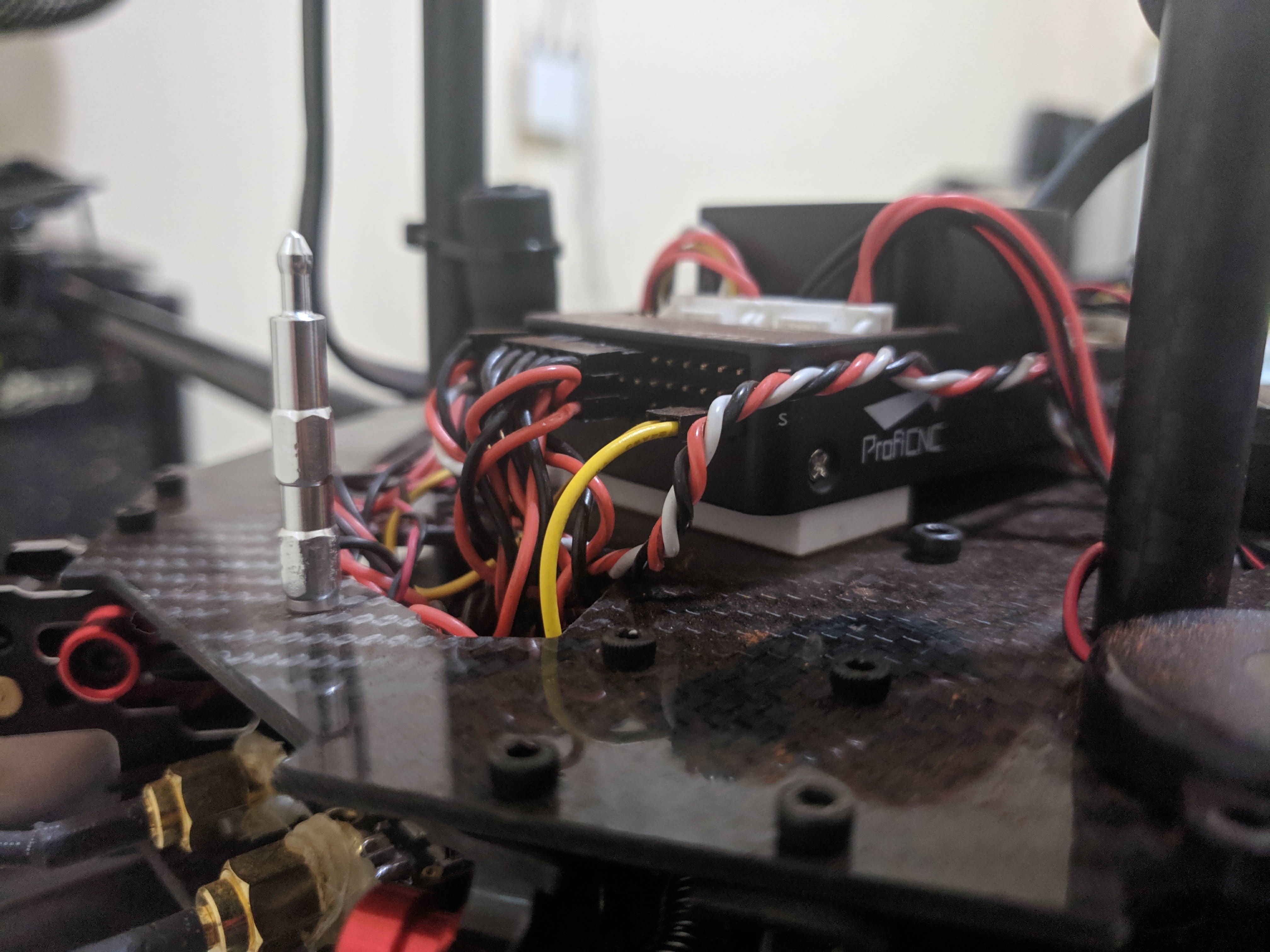
-PIxhawk 2 black cube brand new;
-2 Here2 GPS blend brand new;
-RFD 900 telemetry brand new;
-LW20/C lightware lidar brand new;
-16000mAh 6S battery brand new;
-Takeoff weight: 5.5kg;
As I said, I did hundreds of flight using that same configs but in copter 3.6.12, after update to 4.0+ my problems started, I thought it was hardware problem, thats why I’ve replaced everything to brand new parts.
Its easier I tell what I didnt do, it was auto tuning. Maybe someone will say that is the problem, but remember, before I start having problem I didnt execute auto tune either, I was flying with default PID configs and never had problem, so I never wanted to do tuning until now, becouse its the only thing I havent done.
Just FYI I did:
-Accel cal;
-Compass cal;
-ESC cal;
-RC cal;
-Motor are balanced and leveled;
-Large Vehicle MagCal OK;
-Every single calibration that have in arducopter documents;
I will post my logs AND do auto tuning, but I really want some ideas to try together with tuning.
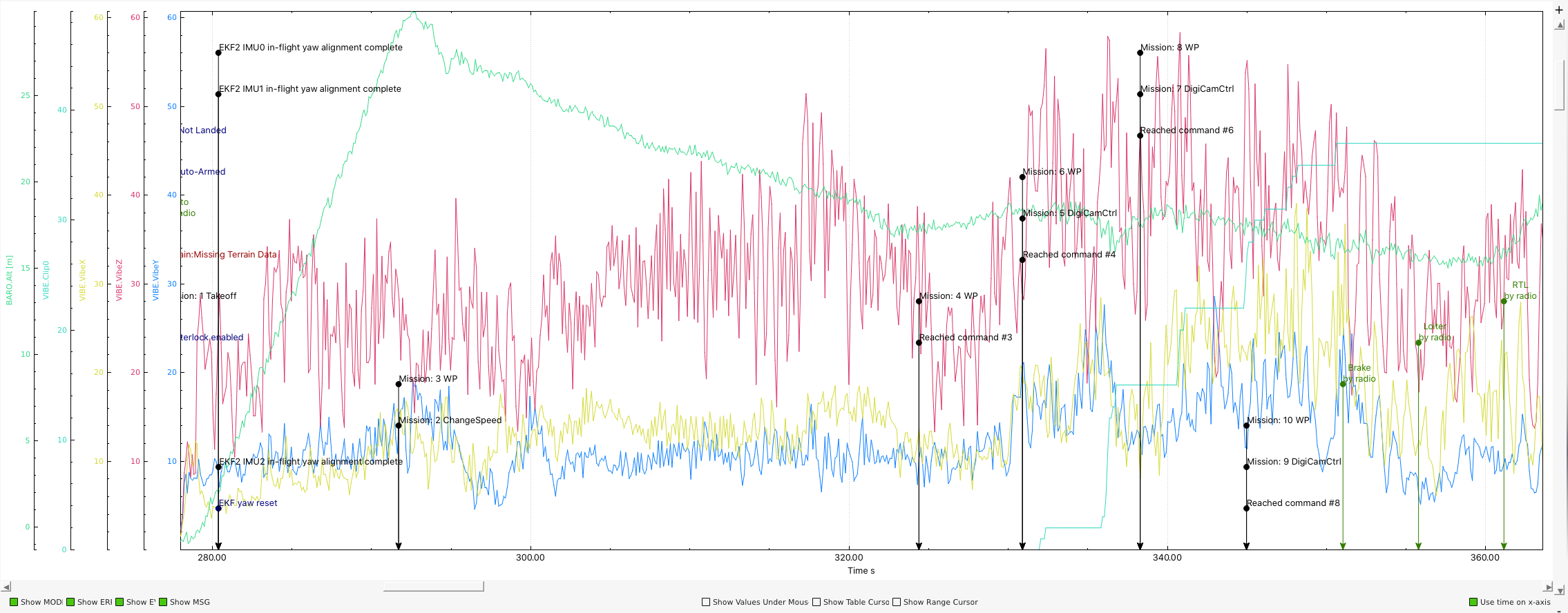
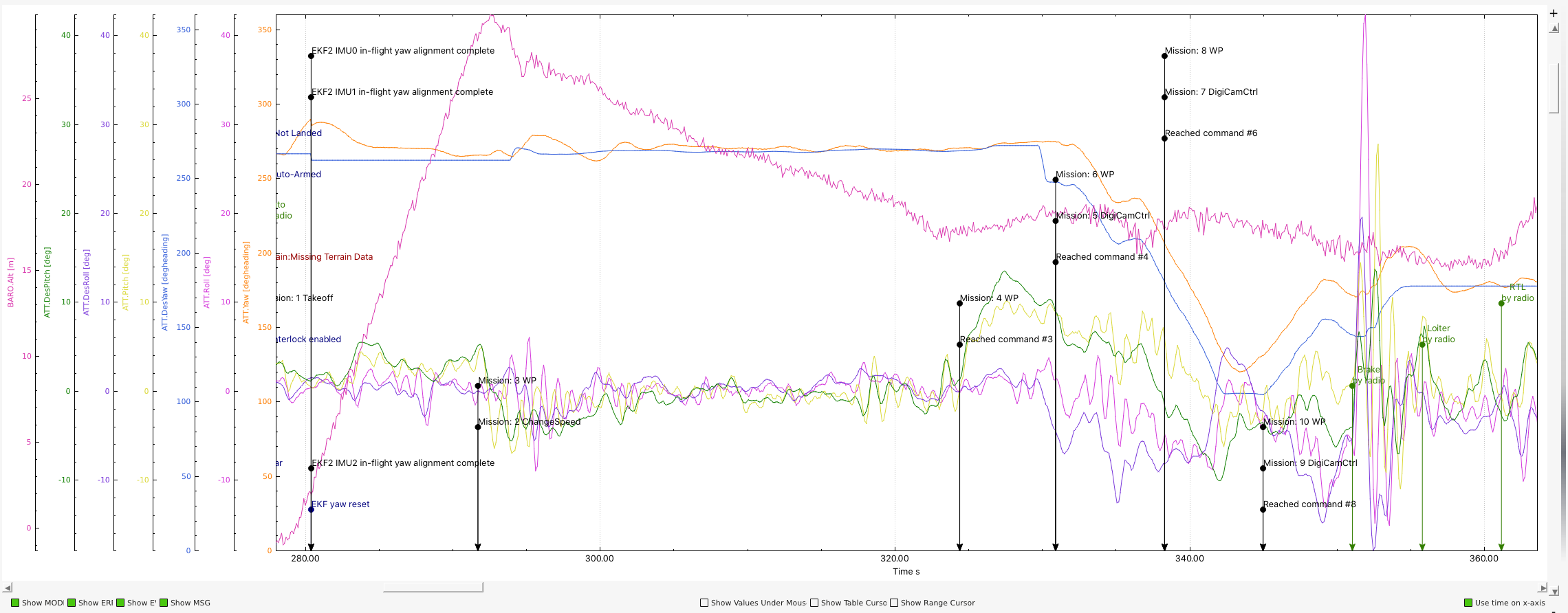
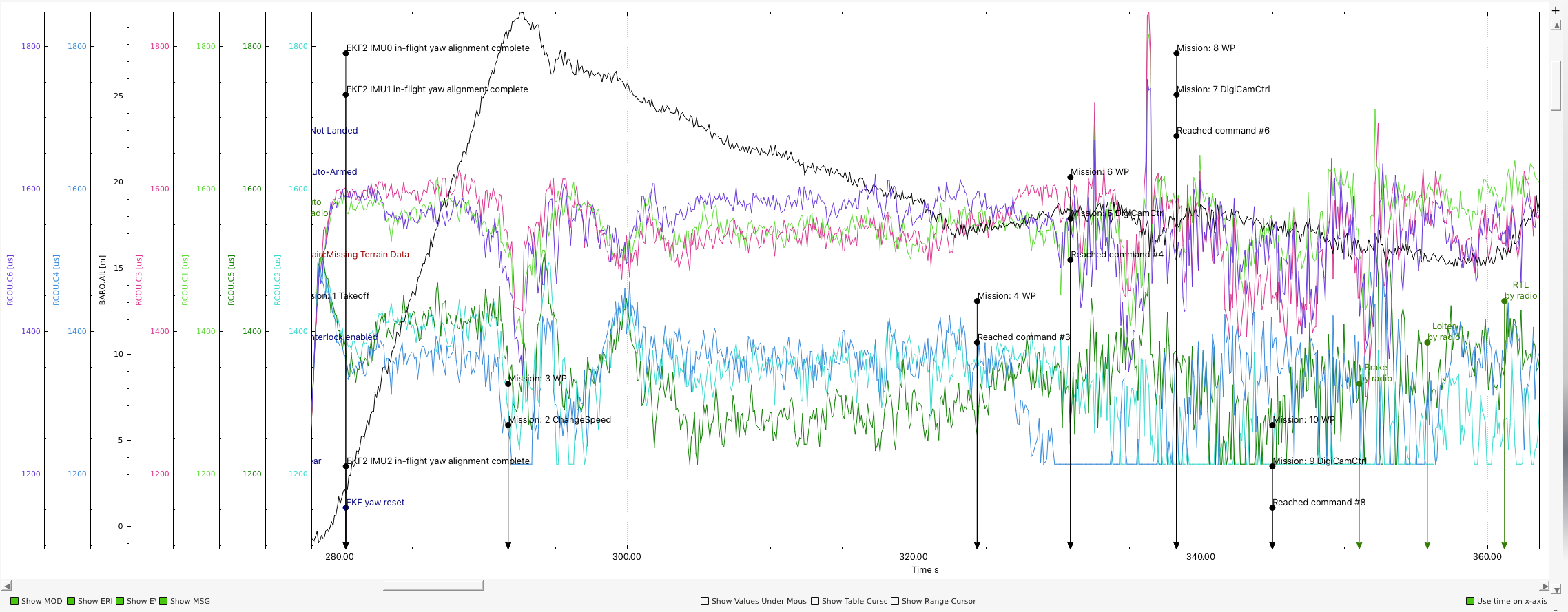
I had problem in all those logs, only in auto mode:
https://drive.google.com/drive/folders/1-gjSYOC8lrGizL-8msLTnZNMuGTcmBDr?usp=sharing
*More info:
-Every time I have to redo large vehicle magcal, becouse every time it isnt face the right angle, right now I put the copter facing North, but it is East, this should happen?
-I’m using External as primary compass and internal as second.