Check and set WP_YAW_BEHAVIOR to suit your requirements during Auto flight. You should be able to change yaw during RTL with RC input but I see none in this log. This is the parameter that STOPS the pilot from changing yaw during RTL: RTL_OPTIONS,1 but you have 0 anyway.
You can set this since you appear to have a spring centred throttle:
PILOT_THR_BHV,7
Check the description of this parameter so you understand the options. This is the value I use.
I dont see a problem with ascent or descent, even though you have a non-standard thrust expo.
Exactly what ESCs do you have?
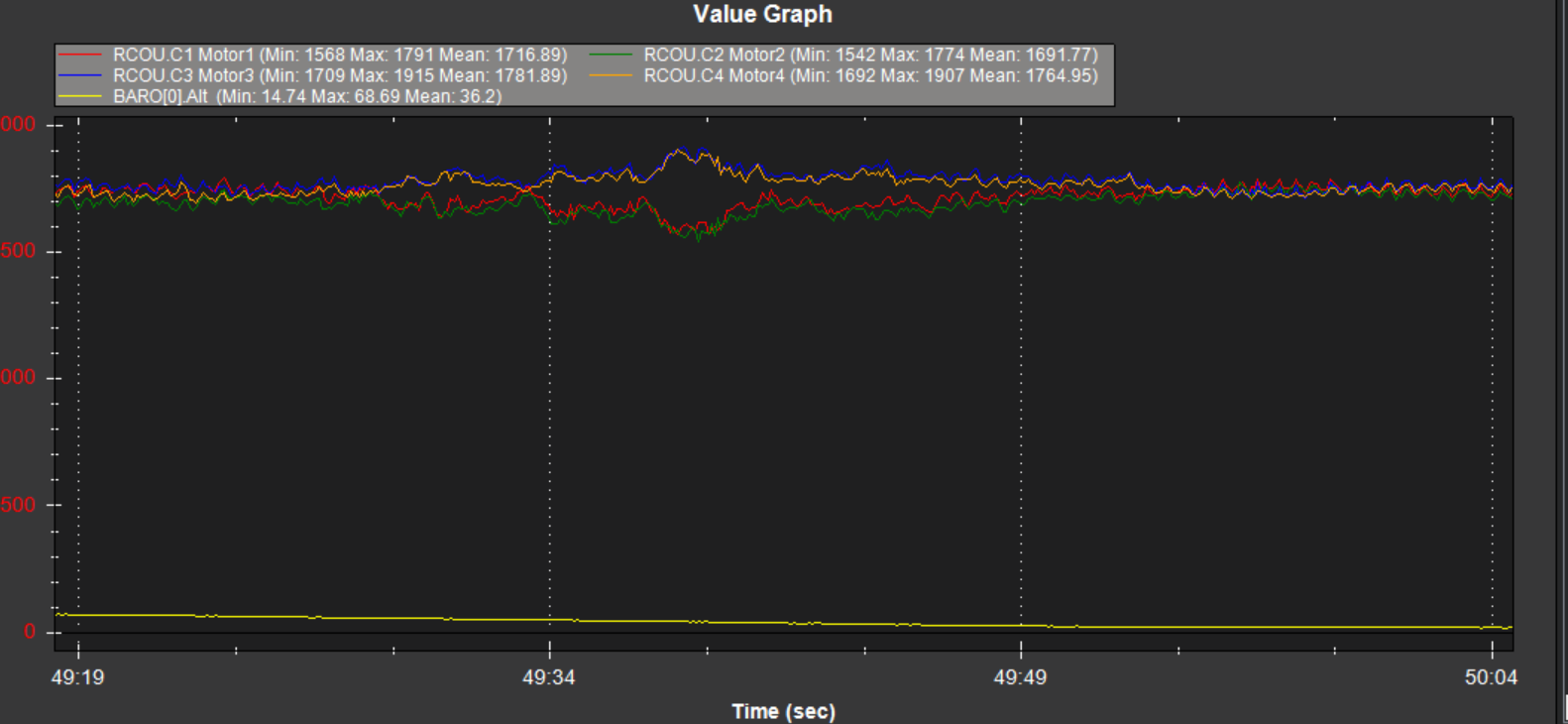
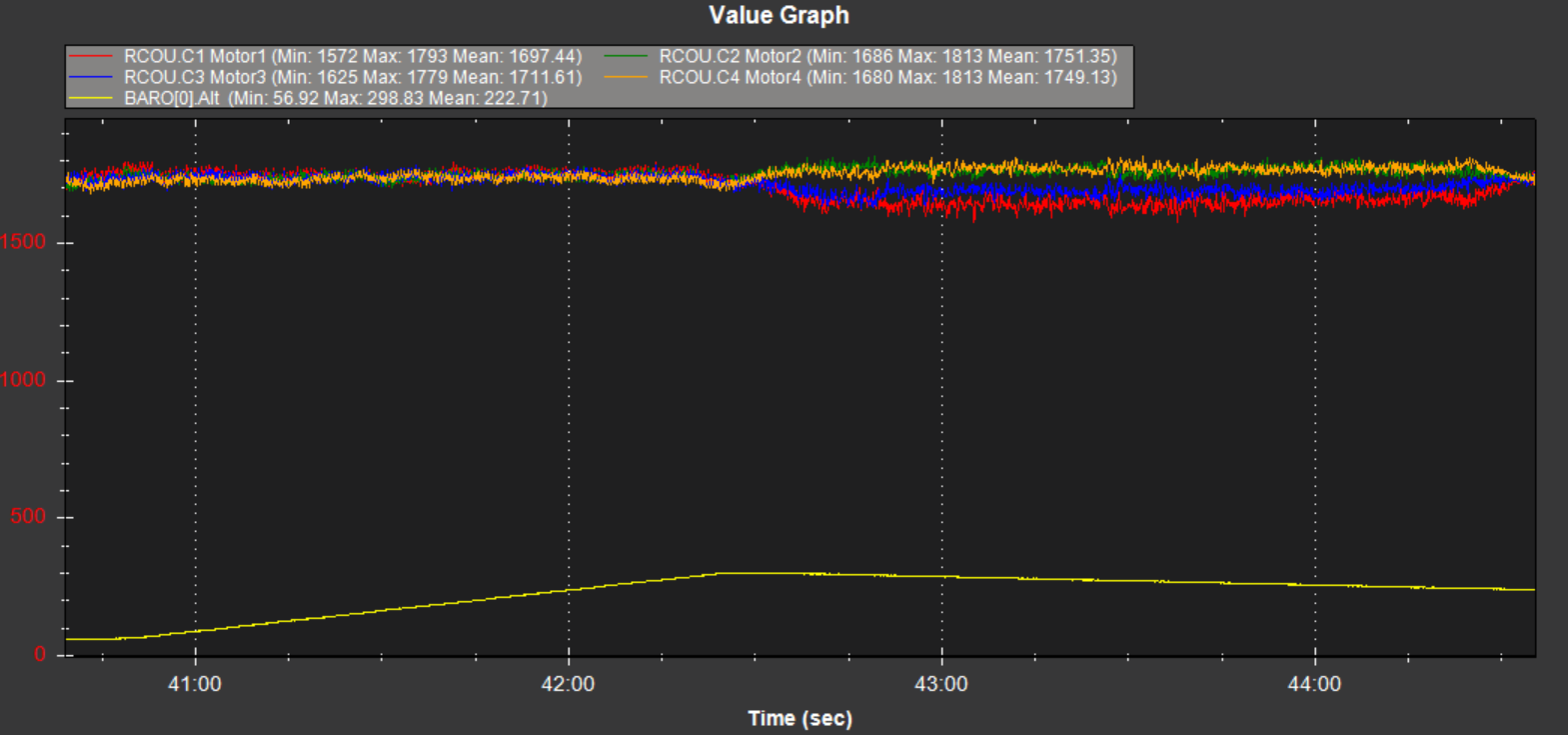
Motor outputs are noisy and more tuning and Harmonic Notch Filter will help this.
The only widely varying motor outputs I see are associated with large changes in pitch and roll. Yaw is a whole issue by itself 
You should definitely set these correctly
BATT_ARM_VOLT
BATT_CRT_VOLT
BATT_FS_CRT_ACT
and you can set:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // set this and refresh to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_REF,0.27
INS_HNTCH_FREQ,30
INS_HNTCH_BW,15
INS_HNTCH_FM_RAT,0.7
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
Set these to try and get Yaw under control, or at least settled down and not so noisy:
ATC_RAT_YAW_D,0.0
ATC_RAT_YAW_I,0.05
ATC_RAT_YAW_P,0.5
These params wont fix everything but will allow us to collect data and see what’s going on.
Just do a flight with AltHold and Loiter - let’s see that .bin log.
EDIT:
I meant to also add in these changes:
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
to fix the GNSS update rates.
And drop these D terms
ATC_RAT_PIT_D,0.006
ATC_RAT_RLL_D,0.006
They might even need to be low but let’s check after the next test flight.