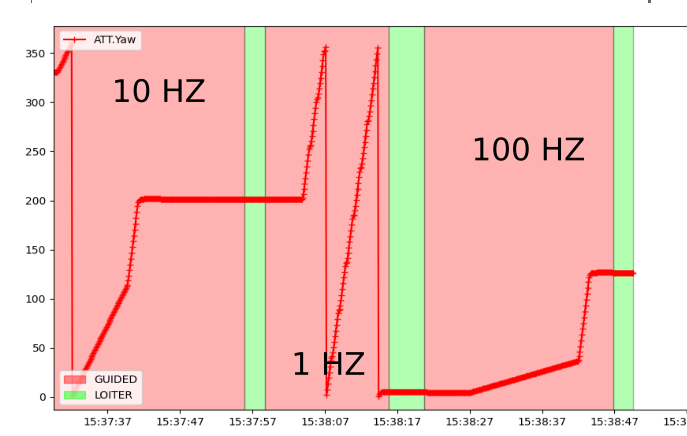
On an upgrade to Copter 4.2+ I’ve found that the MAV_CMD_CONDITION_YAW can’t be spammed at a high rate. Else the drone will yaw extremely slowly. This was not the case on 4.0.3 and below. I attached a simple program below to showcase the behavior. I spammed at 10hz, 1 hz, and 100 hz and found yaw speed to be different.
yaw_sitl_program.txt (7.6 KB)