HI All
I am trying to understand a problem I am having which has caused a few crashes.
I have a Skyjib 8 v1 with 15x5.5 props and xm5015mr-7 motors using a Pixhawk 1 running 3.6.7.
Generally flying in position hold it seems quite stable although I haven’t had a lot of flying time with it.
The issue starts when I push the yaw hard over and leave it there for a couple of rotations.
The first sign of an issue is a wobble in the roll/pitch that increases as it bowls away.
I am flying in a fairly small space so I don’t have much opportunity to recover.
I have uploaded 2 logs available here -
https://drive.google.com/drive/folders/1_DAy1X7FRBgfZoO5MP16H5n6-rRyg0yK?usp=sharing
In log 2.bin the yaw starts at about 13:06:35, the problem starts at about 13:06:39.
By 13:06:44 it has hit the ground.
In log 3.bin the yaw starts at about 10:58:43, the problem starts at about 10:58:49.
At about 10:58:55 it has run into a rope hanging from a tree branch before running off to find a brick wall.
( 8 props, 2 booms and possibly 2 motors to replace  )
)
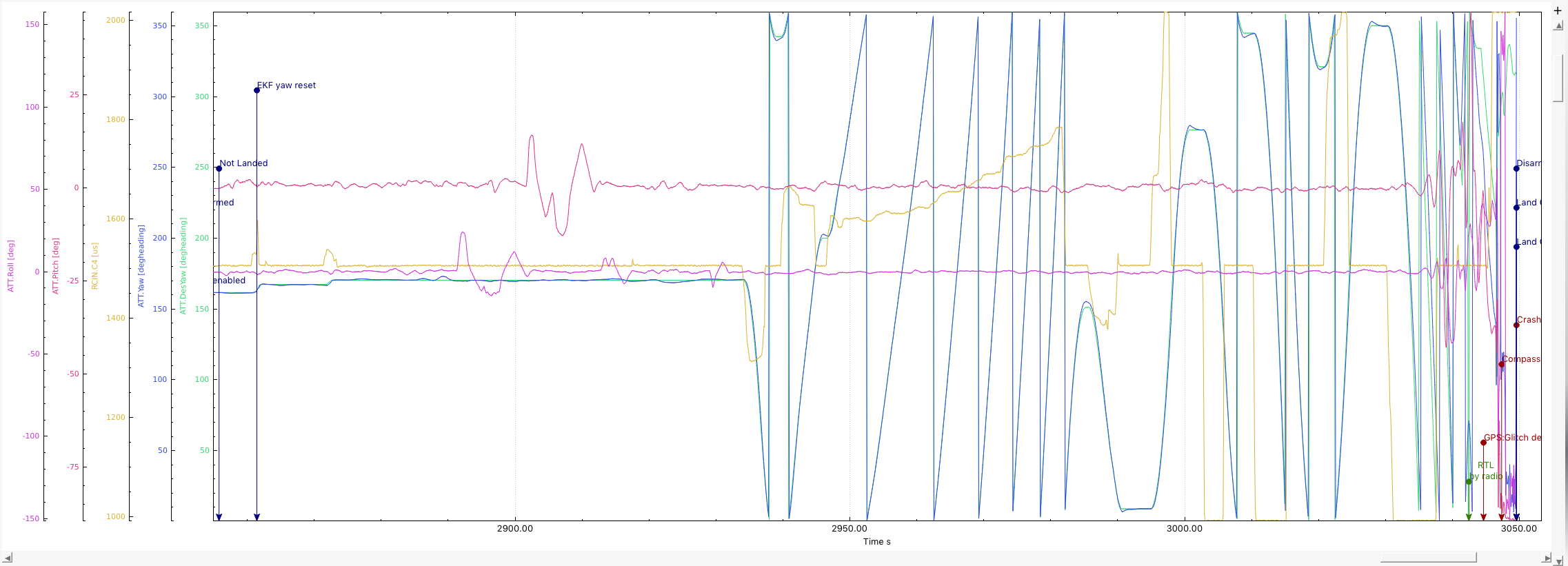
Any hints as to the cause of the roll/pitch instability would be appreciated.
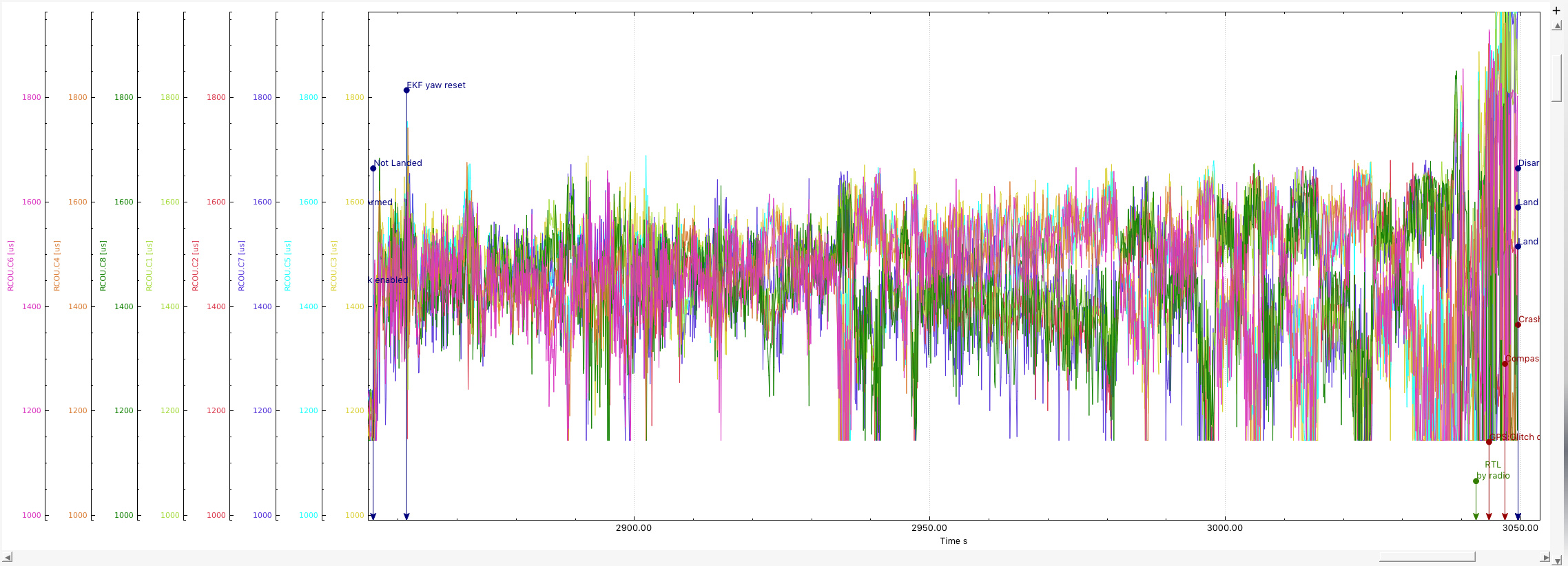
I have also noticed that when the yaw control, RCIN c4, is returned to neutral, for a couple of seconds at least there is no reaction seen on RCOU c1 - c8 to indicate it is trying to stop the yaw. In fact the yaw rate increases according to GyrZ.
The activity in log 3 prior to the problem is an auto-tune.
The value of ATC_RAT_YAW_P is high at a value of 2 but not sure how this could cause the problem.
I was wondering if the I value was getting wound up but noticed I_MAX is not very large.
ATC_RAT_YAW_I,0.2
ATC_RAT_YAW_IMAX,0.5
Any help very much appreciated.
Thanks
Duncan