today I disabled the notch filter prior to trying a brief takoff with a new prop configuration. previous props were all 12.5." CF folding, i changed the top 4 to solid 13" with slightly flatter pitch, bottom remained the same
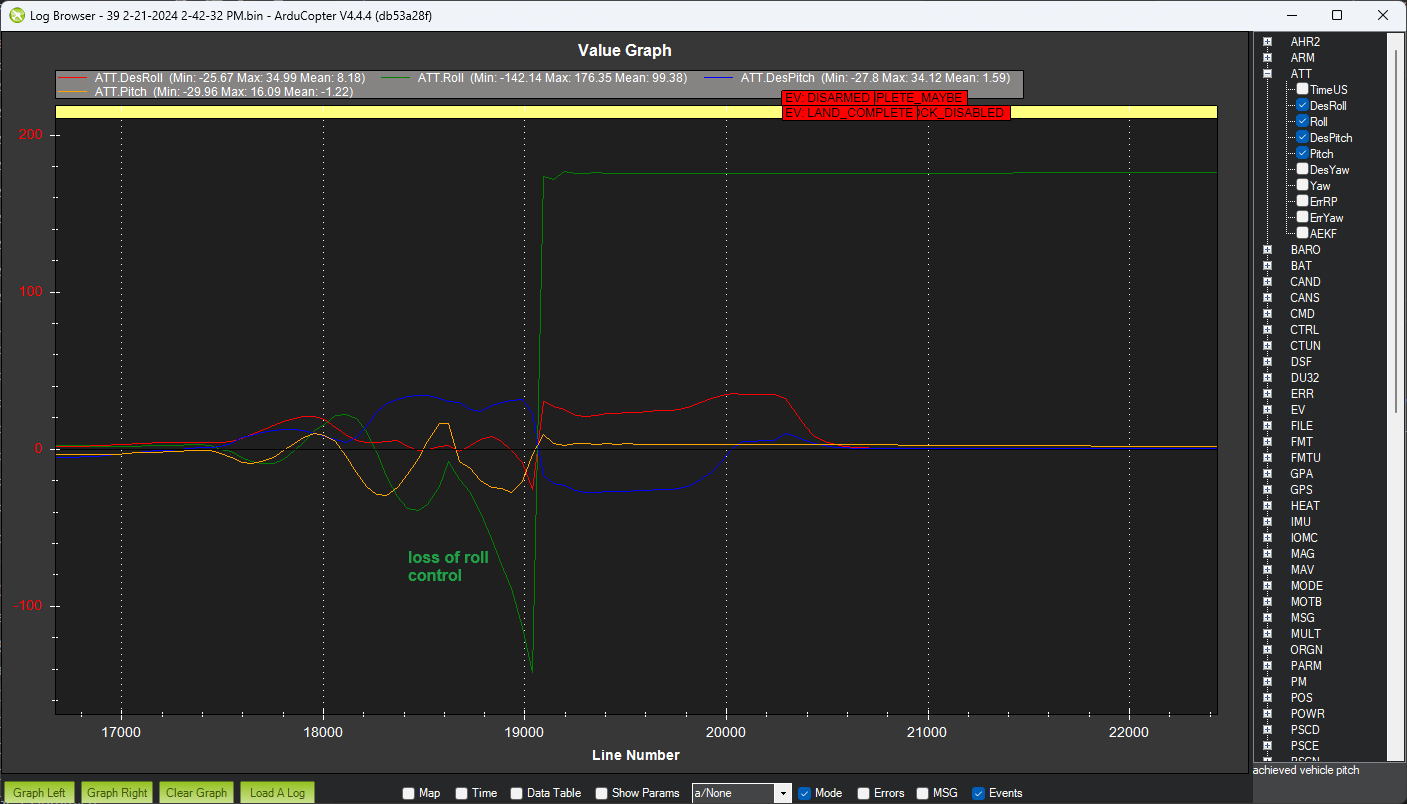
initially the flight seemed nice quiter appeared to have lower vibe, then suddenly after yaw re-alignment the copter rolled left and down into the ground. not sure how much I can salvage , it was only 10 feet above the ground but still made a mess. the log is attached, I would be curious anyone’s take on it BIN FILE
My first time seeing users mix the propeller profile on a single drone. Have you gone for Autotune, if yes under which propeller profile. At which stage are you now?
I maybe wrong, I think the flight control algo general assume identical propeller, motor spec across all arms.
I don’t think props caused crash… I used ecalchs and have studied a bit on the thrusts… the slightly larger disc area and flatter props (13/4.2) paired with slightly smaller 12 1/2 /4.3
The German calculator suggest such a pair will work. I manually tuned the copter… the crash happened immediately after a yaw re alignment.in loiter mode
I was hoping someone could review the log and give input
It looks like this vehicle is using Copter-4.4.4 the current stable so I’ve moved this to the Copter-4.4 category.
I didn’t spend a ton of time looking at the logs but I’d guess there could be an issue with a motor direction or a propeller. The vehicle loses roll control but even before then its not being stressed and doesn’t seem to be controlling its attitude very well.
the graph you showed was exactly what happened, I yawed slightly copter rolled to left down into the ground (at a low altitude)
How can one motor direction / propeller change? (the copter is coaxial) - (just ran moor test and all proper directions varified
All props appear correct orientation (see image) and copter has been in service since late 2016 / 2017 (used blk, orange, and blue (old version) cubes for various reasons
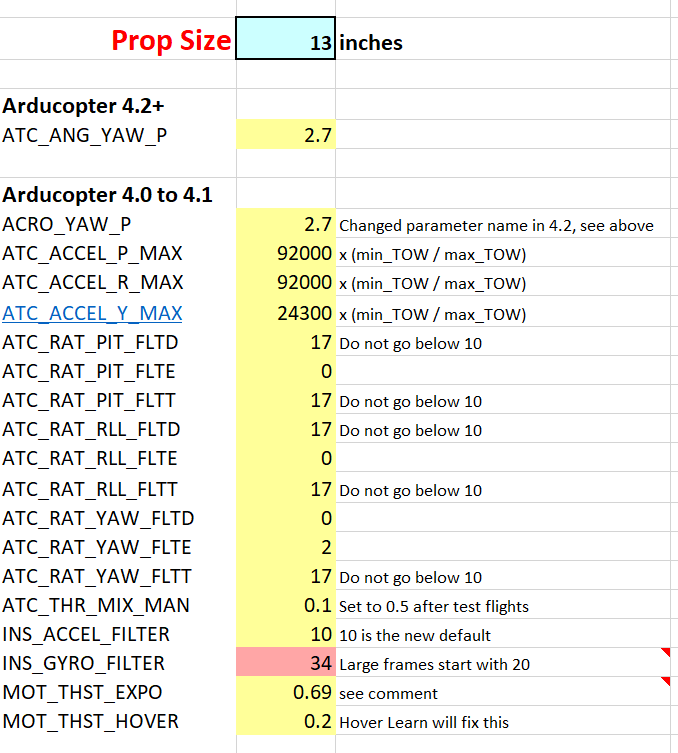
only recent change was replacing folding prop with solid on top 4 motors and changed hz rat filters per autotune instructions, and disabling notch filter
" For large copters (with props at least 13inch or 33cm diameter) set the Rate Roll and Pitch filters to 10hz"
I need to review older logs to see if/ when any settings were changed as mentioned by @Jai.GAY
I think changing the filters to 10hz or 34hz is unlikely to cause a crash like this. The difference is pretty subtle especially on a vehicle of this size. I think it’s more likely to be an issue with an ESC or motor… maybe check the wiring and the dead zone using MP’s motor test screen.
some friends gave input after review of the log… it seems everyone’s comments appear accurate… still trying to piece together what caused it… his comments below. One mentioned the mag field increasing perhaps due to age of motors… anothers comments are below.
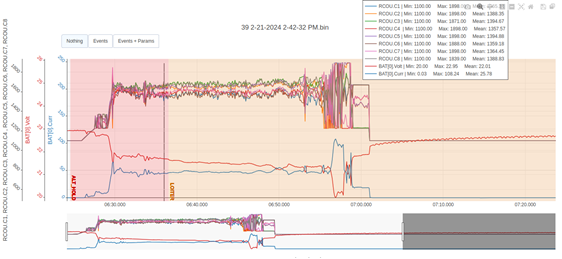
“I think it there was a power issue. The battery is very low at the start of the flight and the voltage is dropping rapidly. The voltage quickly collapses during the loss of control. Simultaneously the current goes up to 108A. If that was an older battery (and it was) it may have been too much for it.”
I suspect there is actually a second issue that exacerbated the power issues (and may have led to the start of the loss of control). "
At this point I do not trust the autopilot, GPS since it ended up inverted and impact the ground pretty hard, so I will rebuild with the carbon frame… Thanks everyone for your help