Hello, I posted a few days ago about having some issues tuning a 5kg X8. After many hours of tuning I got it flying smoothly and locked in.
However it almost crashed twice after trying to return to level While in loiter or altHold modes.
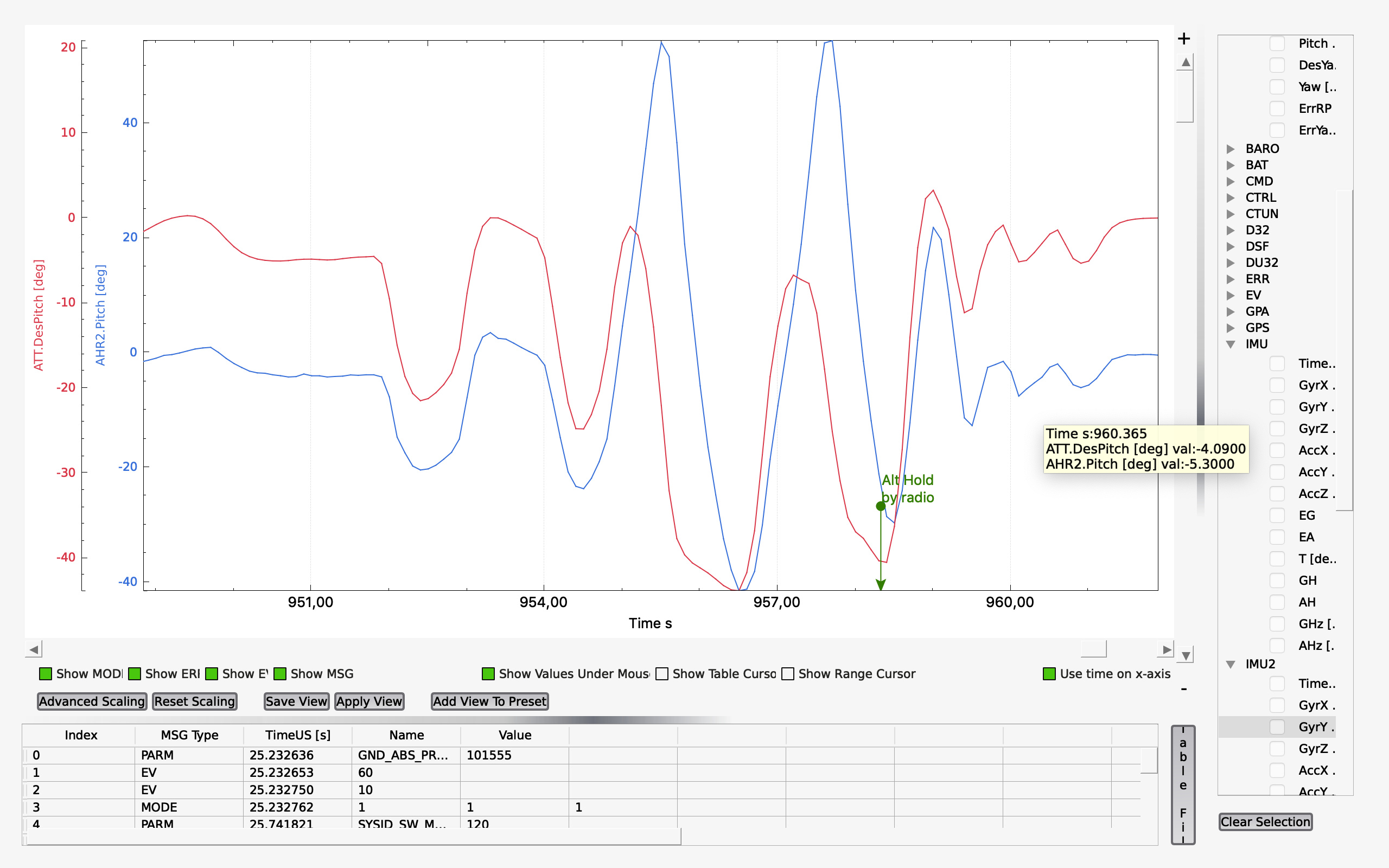
As you can see below from the DesPitch and actual pitch it seems like it overshoots the 0 degrees target by over 40degrees and then just keeps on rocking back and forth until I switch to acro or hits the ground…
I know similar issues are due to low PIDs but mine are pretty high
PID 0,45 0,2 0,035 Stabilize 5,5
I’d greatly appreciate it if you could take a look at the log:
The issue happens at 950s, here’s a screenshot to see what I’m talking about:
Thanks a bunch!